Introduction | Impact of Communication on Control Stability
In recent years, several centralized secondary control strategies have been proposed to manage distributed energy resources (DERs) in advanced low-voltage microgrids (MGs). A centralized architecture involves information exchange between the central controller (CC) and the DERs. These approaches have gained traction due to their high observability, controllability, and simplified control algorithm design, all made possible by low-bandwidth, cost-effective communication technologies.
However, communication networks introduce non-idealities that can directly impact the performance and stability of secondary control systems. Common issues include latency, packet loss, and communication link failures. Latency, for example, can be affected by the processing time of network elements (transmitters, repeaters, receivers), communication path length, packet transmission rate (PTR), and overall network congestion. Similarly, packet loss may occur due to congestion or transmission errors, while link failures often result from interference, burst noise, channel unavailability, or even cyberattacks.
To overcome these communication-related challenges, this work introduces a latency-robust adaptive control method for regulating active and reactive power flow at the point of common coupling (PCC) in centralized, grid-connected MGs. The proposed strategy dynamically adjusts key CC parameters, such as the digital anti-aliasing filter cutoff frequency and PTR, to maintain system stability and ensure the fastest possible response to reference variations.
Challenges | Communication and Secondary Control
Despite the essential role of communication in enabling secondary control strategies for MGs, the literature review reveals that most studies idealize communication, disregarding the impact of communication non-idealities on the performance and stability of such strategies. Communication issues, such as latency and packet loss, can degrade control performance by increasing oscillations in voltage, current, or controlled power, potentially leading the system to instability. Therefore, an in-depth investigation of the effects caused by communication-related problems is necessary for developing robust strategies that ensure effective and stable MG operation. Mathematical models representing the dynamics of communication-based MG control are important tools to help achieve these goals.
Solution | Latency-Robust Adaptive Control
Figure 1 shows the mathematical model in the Laplace domain used for the development of the latency-robust adaptive control strategy.
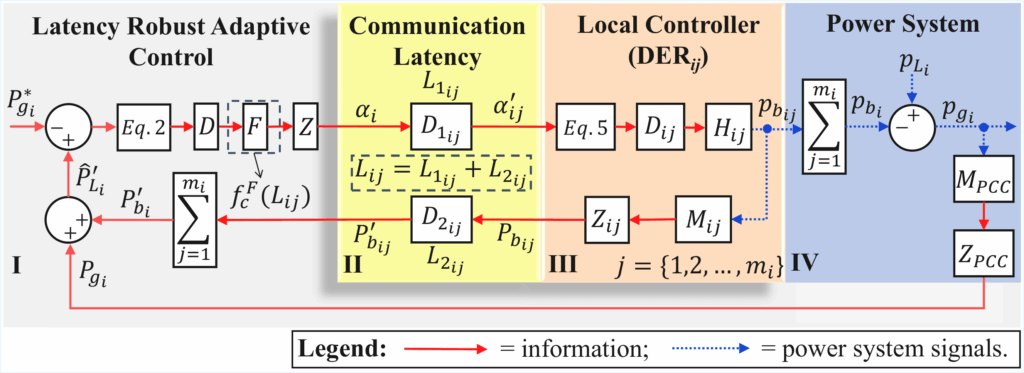
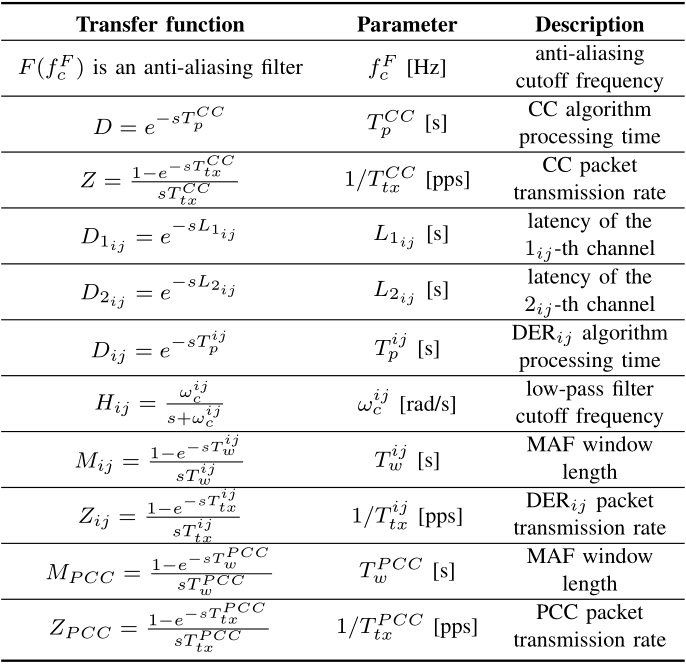
The model is divided into four parts: (i) the latency-robust adaptive control implemented in the central controller; (ii) the communication latency; (iii) the local controller of the DERs; and (iv) the power system. The model refers to active power control, but an equivalent model for reactive power can also be derived. Table 1 lists the transfer functions used in the model.
To analyze the effect of communication latency on control performance, the transfer function of the active power flow output (![]() ) with respect to the control reference (
) with respect to the control reference (![]() ) is obtained from the mathematical model. Based on this function and in the parameters of Table 2, settling time curves as a function of communication latency (
) is obtained from the mathematical model. Based on this function and in the parameters of Table 2, settling time curves as a function of communication latency (![]() ) are obtained in MATLAB up to the control stability limit, as shown in Figure 2, where you can see the settling time curves for 1 Hz ≤
) are obtained in MATLAB up to the control stability limit, as shown in Figure 2, where you can see the settling time curves for 1 Hz ≤ ![]() ≤ 20 Hz with
≤ 20 Hz with ![]() . The red points represent the stability limits for each
. The red points represent the stability limits for each ![]() , and the coloured points represent the controller’s adaptation thresholds, which ensure stable operation and the minimum settling time (lowest curve) for any latency value.
, and the coloured points represent the controller’s adaptation thresholds, which ensure stable operation and the minimum settling time (lowest curve) for any latency value.
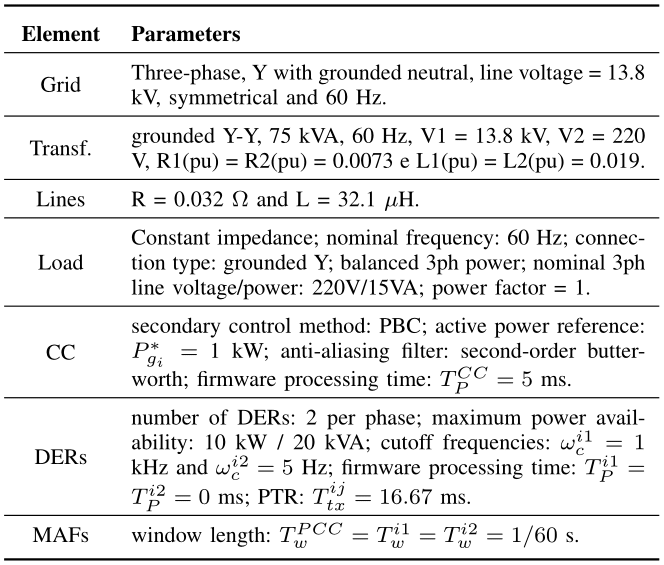
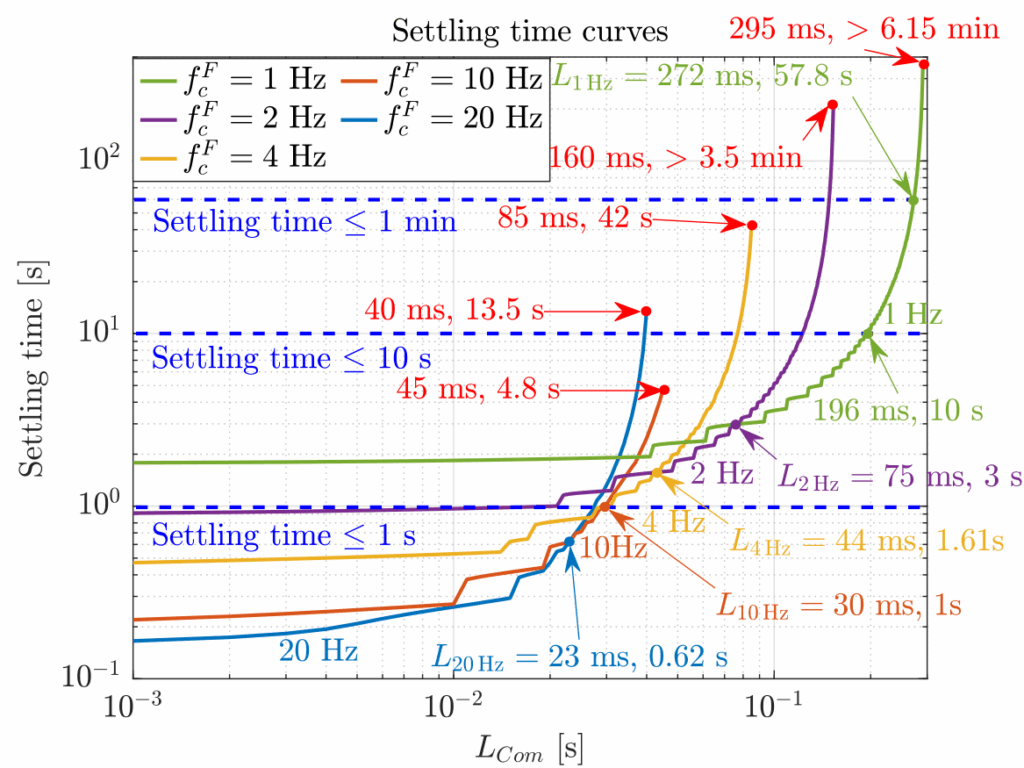
Figure 3 shows the single-line diagram of the LV MG used to validate the proposed strategy, with its features listed in Table 2. It is an advanced MG that incorporates the power dispatchability feature at the MG PCC. Figure 4 shows the test bench used to validate the proposed control method, which follows a controller Hardware-in-the-Loop (C-HIL) configuration, where the Typhoon HIL’s HIL402 real-time simulator simulates the power system of Figure 3, while the Raspberry Pi 5 is used to implement the MG CC. Communication between CC and DERs is established over an Ethernet network, employing the UDP protocol, Category 5e cabling, and a standard router.
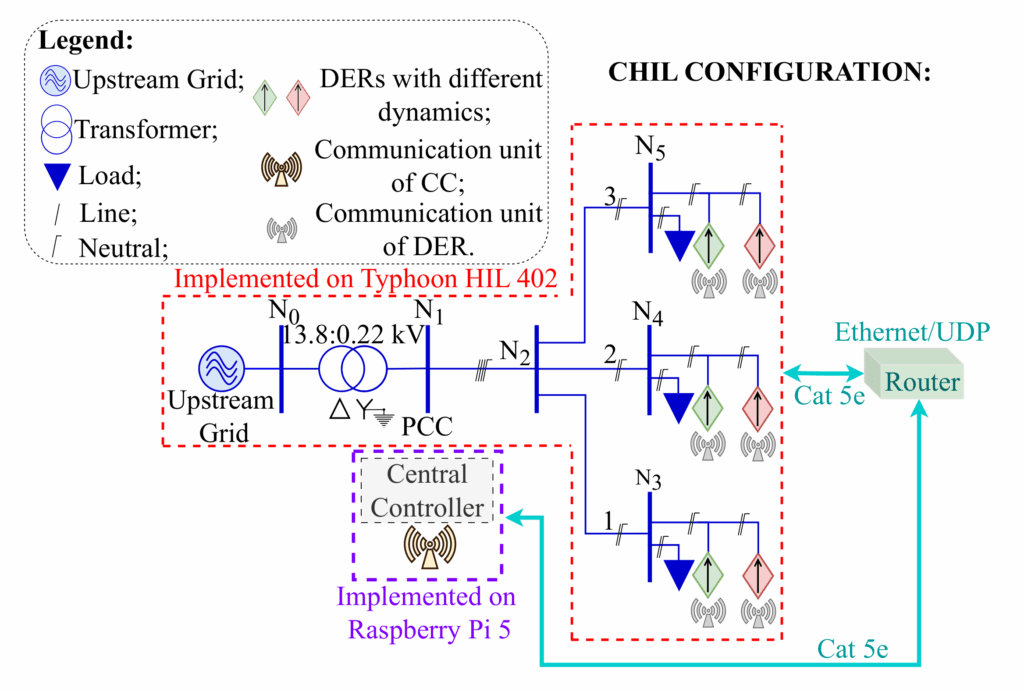
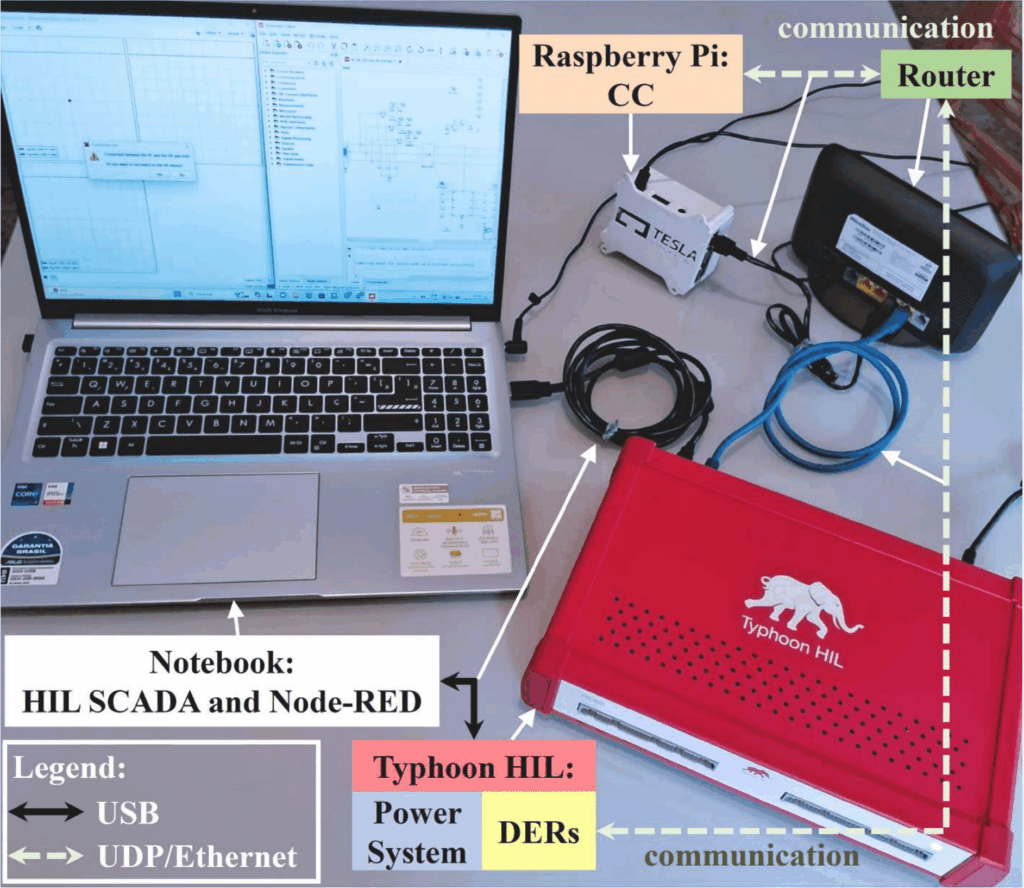
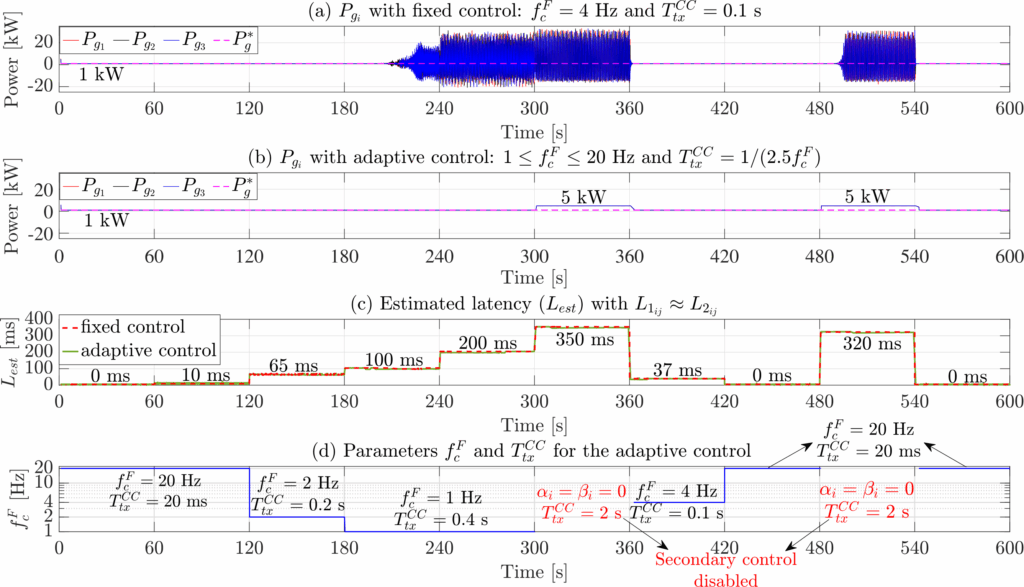
Figure 5 shows the grid active power obtained in C-HIL tests with (a) fixed control with ![]() and
and ![]() , and (b) adaptive control with
, and (b) adaptive control with ![]() ,
, ![]() , and adaptation thresholds defined in Fig. 2. (c) Estimated latency (
, and adaptation thresholds defined in Fig. 2. (c) Estimated latency (![]() ) with
) with ![]() . (d) Parameters
. (d) Parameters ![]() and
and ![]() of the adaptive control.
of the adaptive control.
Note that the adaptive control (Figure 5(b)) maintains MG stability throughout the entire test duration, while the fixed control (Figure 5(a)) destabilizes the MG when latency exceeds 85 ms, which corresponds to the maximum allowed for ![]() . The adaptive control disables secondary control when latency exceeds the maximum limit for stable operation to preserve MG stability, which in this case is defined as 295 ms. In this situation, the DERs operate only with primary control active, and the MG loses its power dispatch capability. Secondary control is reactivated when latency decreases below 295 ms.
. The adaptive control disables secondary control when latency exceeds the maximum limit for stable operation to preserve MG stability, which in this case is defined as 295 ms. In this situation, the DERs operate only with primary control active, and the MG loses its power dispatch capability. Secondary control is reactivated when latency decreases below 295 ms.
Under these settings, the adaptive control ensures the provision of ancillary services with time requirements greater than or equal to 1 min, such as load-following and load-leveling. The maximum settling time can be redefined in the controller according to the maximum latency allowed for its operation, enabling the provision of ancillary services with stricter time constraints.
Performance analysis of the latency-robust adaptive control in terms of settling time and communication failures, as well as details of the theoretical model and the flowchart describing the complete controller operation, can be found in the paper “Latency-Robust Adaptive Control for Centralized Advanced Microgrids,” which will be published in COBEP 2025 proceedings and made available via IEEE Xplore.
HIL Benefits | Ease into HIL Testing without the Steep Learning Curve
Typhoon HIL was essential for the development of this work, not only because of the hardware and software solutions provided for the validations, but also due to the close support from application engineers who assist with implementations. The importance of the courses available at the HIL Academy is also highlighted, specifically the modules on HIL for Power Electronics, HIL Fundamentals, and Communication Protocols, of the HIL Specialist 2.0 Specialization program, which were fundamental for implementing the validation setup of the control strategy presented in this blog article.