はじめに| 通信が制御安定性に与える影響
近年、先進的な低電圧マイクログリッド(MG)における分散型エネルギー資源(DER)を管理するため、複数の集中型二次制御戦略が提案されている。集中型アーキテクチャでは、中央制御装置(CC)とDER間の情報交換が行われる。これらの手法は、低帯域幅でコスト効率の高い通信技術によって実現される高い観測性、制御性、および簡素化された制御アルゴリズム設計により、注目を集めている。
しかしながら、通信ネットワークには非理想性が存在し、これが二次制御システムの性能と安定性に直接影響を及ぼす可能性がある。一般的な問題には、遅延、パケット損失、通信リンク障害などが含まれる。 例えば遅延は、ネットワーク要素(送信機、中継器、受信機)の処理時間、通信経路の長さ、パケット伝送率(PTR)、ネットワーク全体の輻輳状態によって影響を受けます。同様に、パケット損失は輻輳や伝送エラーによって発生する可能性があり、リンク障害は干渉、バーストノイズ、チャネル利用不可、さらにはサイバー攻撃によって引き起こされることがよくあります。
これらの通信関連の課題を克服するため、本研究では集中型グリッド接続マイクログリッド(MG)における共通結合点(PCC)での有効電力・無効電力フローを制御する遅延耐性適応制御手法を提案する。提案手法は、デジタルアンチエイリアシングフィルタのカットオフ周波数やPTRといった主要なCCパラメータを動的に調整し、システム安定性を維持するとともに、参照値変動に対する最速応答を確保する。
課題 | コミュニケーションと二次制御
MGの二次制御戦略を実現する上で通信が果たす本質的な役割にもかかわらず、文献調査によれば、ほとんどの研究は通信を理想化し、通信の非理想性がこうした戦略の性能と安定性に及ぼす影響を無視している。遅延やパケット損失といった通信問題は、電圧・電流・制御電力の振動を増大させることで制御性能を低下させ、システムの不安定化を招く可能性がある。 したがって、効果的かつ安定したMG運転を保証する堅牢な戦略を開発するには、通信関連問題による影響を詳細に調査することが必要である。通信ベースのMG制御の動的挙動を表現する数学モデルは、これらの目標達成を支援する重要なツールとなる。
ソリューション | 遅延耐性適応制御
図1は、遅延に頑健な適応制御戦略の開発に使用されたラプラス領域における数学モデルを示す。
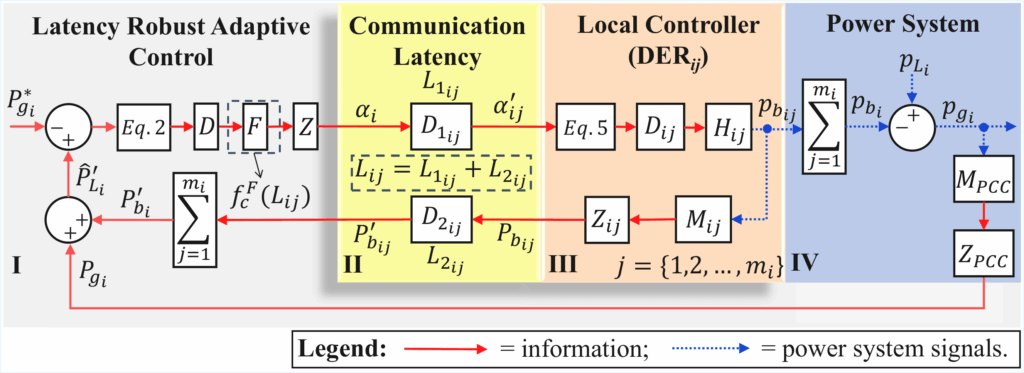
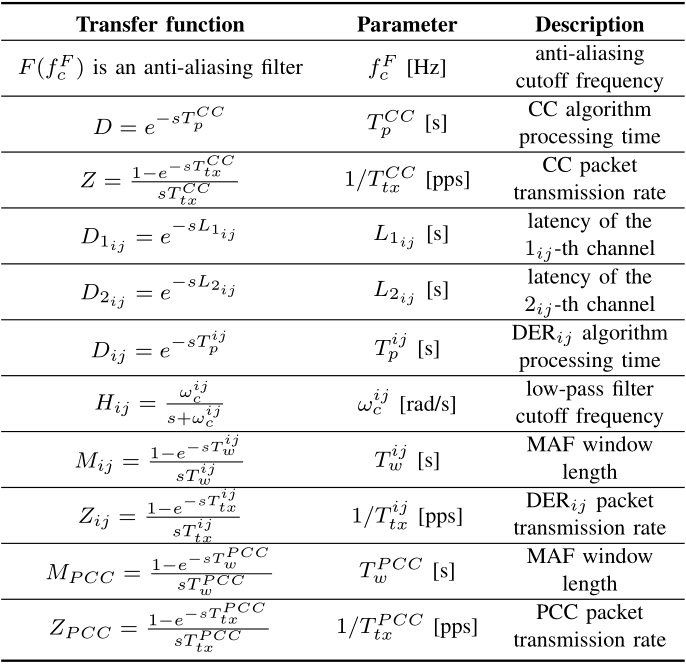
モデルは四つの部分に分かれる:(i) 中央制御装置に実装された遅延耐性適応制御、(ii) 通信遅延、(iii) 分散型エネルギー資源(DER)のローカル制御装置、(iv) 電力システムである。本モデルは有効電力制御を対象とするが、無効電力に対する同等のモデルも導出可能である。表1にモデルで使用される伝達関数を示す。
通信遅延が制御性能に及ぼす影響を分析するため、有効電力フロー出力の伝達関数(![]() 制御基準に対する(
制御基準に対する(![]() この関数と表2のパラメータに基づき、通信遅延(
この関数と表2のパラメータに基づき、通信遅延(![]() 図2に示すように、制御安定性の限界までMATLABで得られた結果では、1 Hz ≤
図2に示すように、制御安定性の限界までMATLABで得られた結果では、1 Hz ≤ ![]() ≤ 20 Hz において
≤ 20 Hz において ![]() 赤い点は各々の安定性の限界を示している。
赤い点は各々の安定性の限界を示している。 ![]() また、色付きの点はコントローラの適応しきい値を表しており、あらゆる遅延値において安定した動作と最小の安定時間(最も低い曲線)を保証します。
また、色付きの点はコントローラの適応しきい値を表しており、あらゆる遅延値において安定した動作と最小の安定時間(最も低い曲線)を保証します。
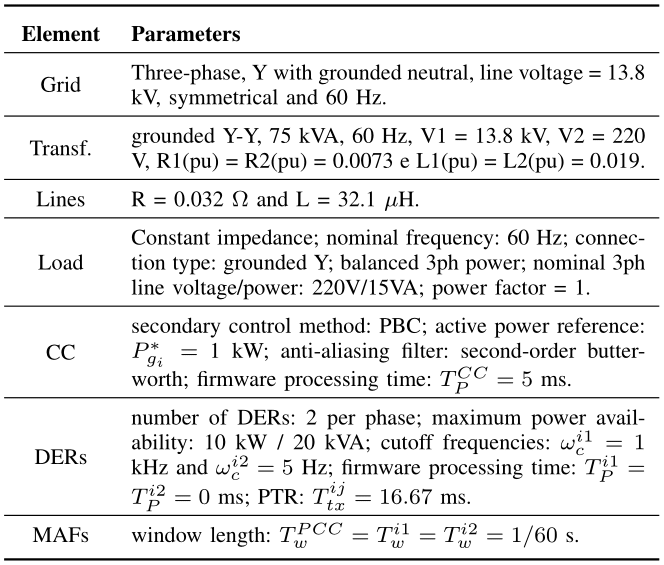
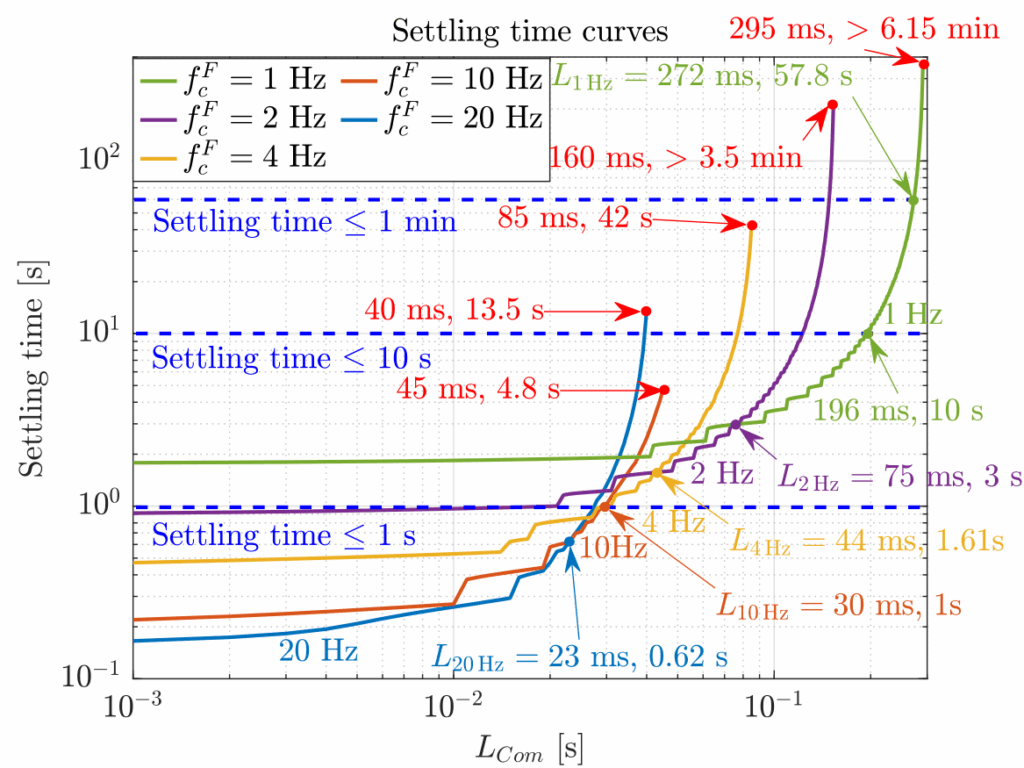
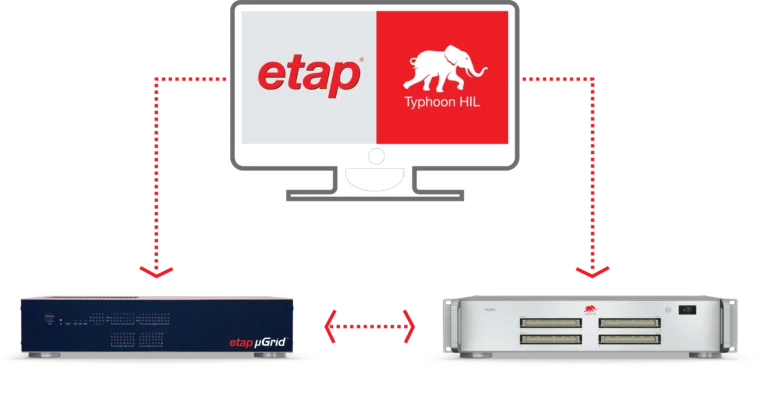
図3は、提案された制御戦略の検証に使用した低圧配電変電所(LV MG)の単線図を示しており、その特徴は表2にまとめられている。これは、配電変電所(MG)のPCCに電力調整機能を組み込んだ先進的な配電変電所である。 図4は、提案された制御手法の検証に使用したテストベンチを示している。これはコントローラ・ハードウェア・イン・ザ・ループ(C-HIL)構成を採用しており、Typhoon HILリアルタイムシミュレータが図3の電力システムをシミュレートし、Raspberry Pi 5がMG CCの実装に使用されている。 CCとDER間の通信は、UDPプロトコル、カテゴリ5eケーブル、および標準ルーターを用いて、イーサネットネットワーク上で確立される。
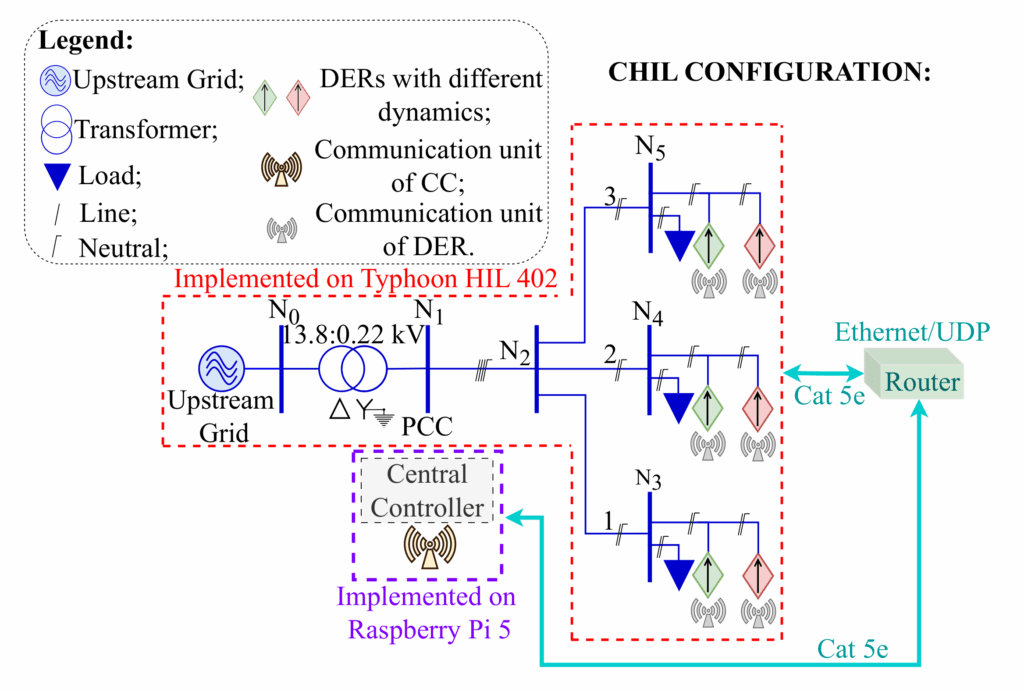
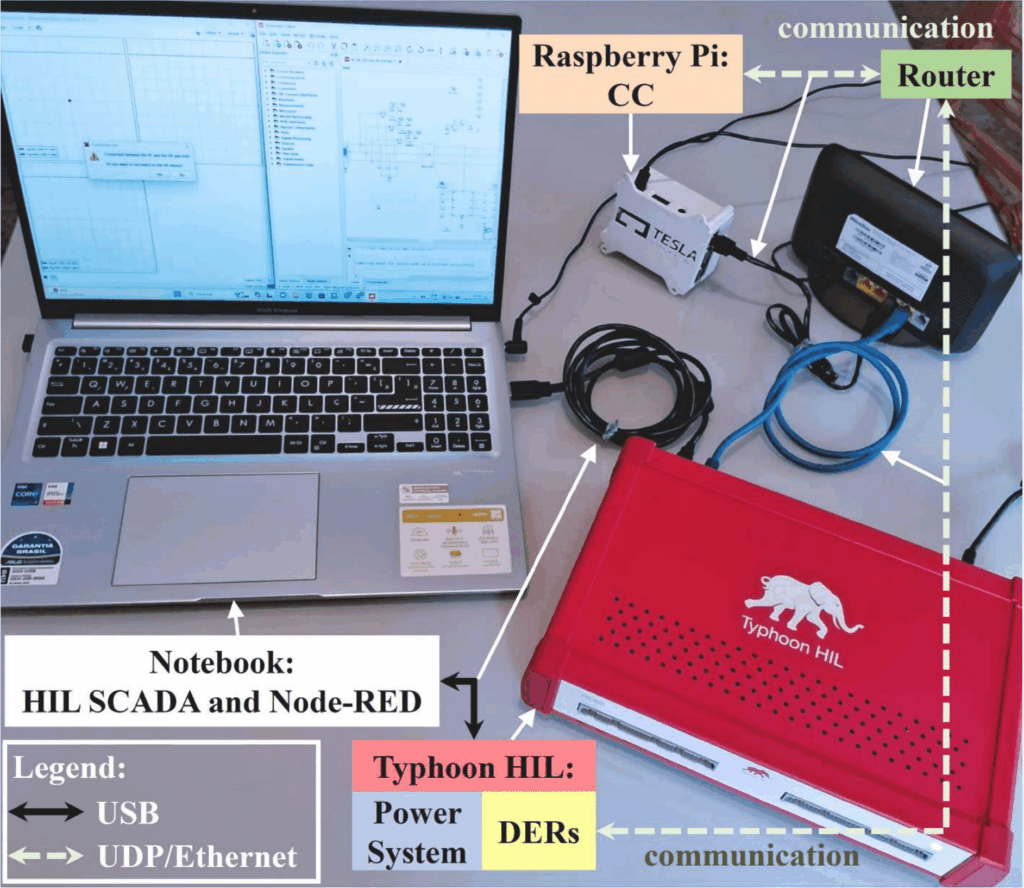
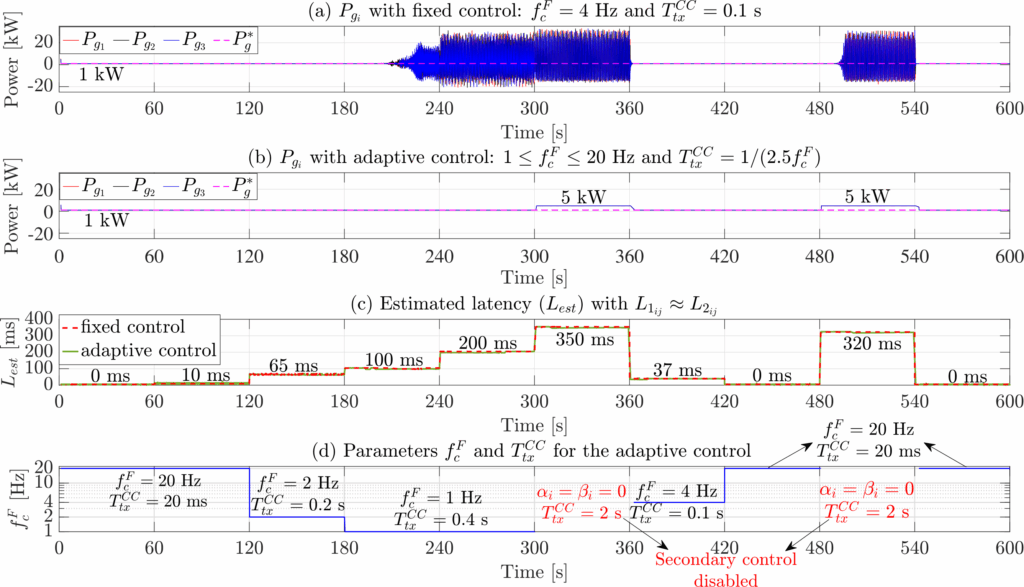
図5は、C-HIL試験で得られたグリッド有効電力を示す。図(a)は固定制御の場合、 ![]() そして
そして ![]() (b) 適応制御による
(b) 適応制御による ![]() ,
, ![]() 図2に定義された適応閾値。(c) 推定遅延時間(
図2に定義された適応閾値。(c) 推定遅延時間(![]() ) with
) with ![]() (d) パラメータ
(d) パラメータ ![]() そして
そして ![]() 適応制御の
適応制御の
適応制御(図5(b))は試験期間全体を通じてMGの安定性を維持する一方、固定制御(図5(a))は遅延が85ミリ秒を超えるとMGを不安定化させる。これは許容最大値に対応する。 ![]() 適応制御は、遅延が安定運転の最大許容値(本ケースでは295ミリ秒と定義)を超過した場合、MGの安定性を維持するため二次制御を無効化する。この状況下では、DERは一次制御のみが有効な状態で動作し、MGは電力調整能力を失う。遅延が295ミリ秒を下回った時点で二次制御が再有効化される。
適応制御は、遅延が安定運転の最大許容値(本ケースでは295ミリ秒と定義)を超過した場合、MGの安定性を維持するため二次制御を無効化する。この状況下では、DERは一次制御のみが有効な状態で動作し、MGは電力調整能力を失う。遅延が295ミリ秒を下回った時点で二次制御が再有効化される。
これらの設定下では、適応制御は負荷追従や負荷平準化など、1分以上の時間要件を伴う補助サービスの提供を保証する。最大応答時間は、その動作に許容される最大遅延時間に応じて制御器内で再定義可能であり、より厳しい時間制約を伴う補助サービスの提供を可能とする。
遅延耐性適応制御の性能解析(応答時間と通信障害に関するもの)ならびに理論モデルの詳細、および制御器の完全な動作を記述するフローチャートについては、論文「集中型先進マイクログリッドのための遅延耐性適応制御」に記載されている。本論文はCOBEP 2025プロシーディングスに掲載され、IEEE Xplore経由で公開される予定である。
HILのメリット | 急な学習曲線なしにHILテストを容易に導入
Typhoon HIL 、検証のためのハードウェアおよびソフトウェアソリューションを提供してくれただけでなく、実装を支援するアプリケーションエンジニアによる手厚いサポートも得られたことから、本プロジェクトの開発において不可欠なTyphoon HIL 。 また、HILアカデミーで提供されているコースの重要性も強調されています。特に、「HIL Specialist 2.0」専門プログラム内の「パワーエレクトロニクス向けHIL」、「HILの基礎」、「通信プロトコル」に関するモジュールは、本ブログ記事で紹介する制御戦略の検証環境を構築する上で不可欠なものでした。