
はじめに | デジタルツインとは何か? HILではどのように機能するのか?
再生可能エネルギーへの移行は着実に進んでおり、現在の情勢が外国産天然ガスや石油への依存からの脱却を急務としている。持続可能なエネルギー技術と送電網制御手法の進歩がこれを可能にしており、地域での電力生成と共有はかつてないほど容易になった。しかし、これらの変化を実際に実現すること自体が大きな課題である。 既存の送電網インフラは新旧の設備が複雑に混在しており、その大半は分散型再生可能エネルギー源やエネルギー貯蔵がもたらす特有の送電網バランス調整・安定性課題に対応するよう設計されていない。このため、新たな送電網設備や制御機構は、予期せぬ深刻な結果を招かないよう慎重に試験されねばならない。各サイトの固有の現地条件を考慮しつつ、こうした複雑な相互作用を安全に試験できる環境があればどれほど良いだろうか!
デジタルツインが登場する。デジタルツインとは、物理的なデバイスやシステムの高精度数学モデルである。この定義におけるキーワードは「高精度」だ。これは、同じ条件や刺激に対して、デジタルツインが物理デバイスやシステムとまったく同じ挙動を示すことを意味する。 例えば、太陽光発電所のデジタルツインは、物理的な発電所と同一の条件(日射量、外気温、PVパネルの種類、PVパネルの状態(例:最近清掃された状態か大気汚染を受けた状態か)、太陽光発電所で使用されるインバーターの種類など)において、物理的な発電所と全く同じ量の電力を生成し、同じ電力品質(電圧、周波数、高調波など)を提供します。
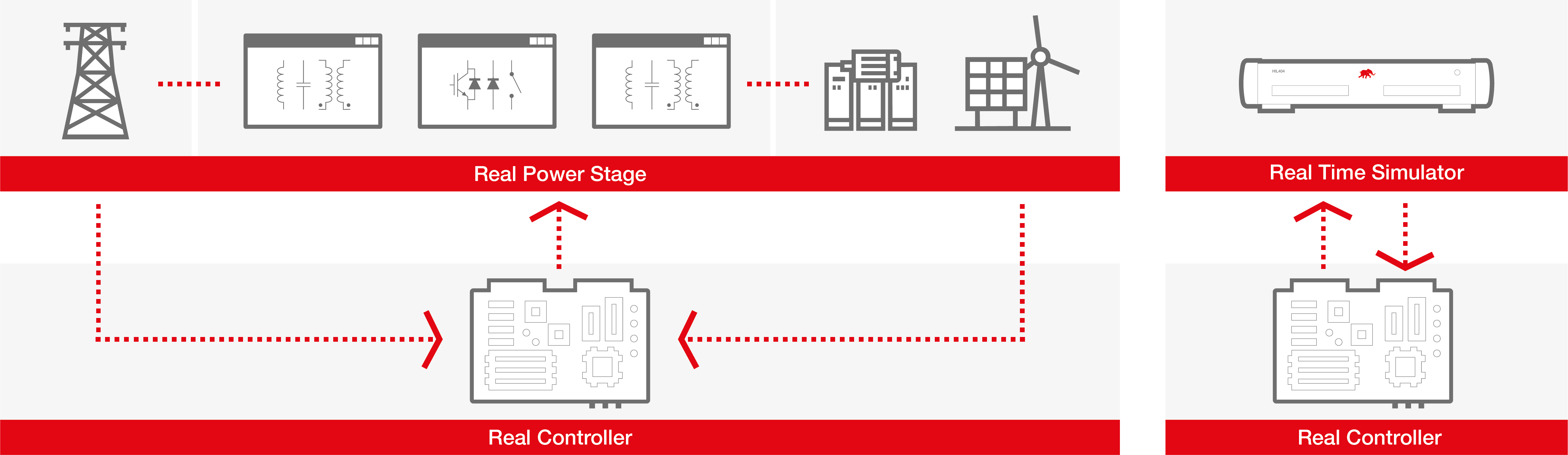
ハードウェア・イン・ザ・ループ(HIL)手法は、デジタルツインと物理デバイスまたはシステム間のインターフェースとして機能し、デジタルツインを活用する最も強力な方法である。 具体的には、HILテストでは被試験装置(DUT)が実際のシステム上で動作していると「認識」させつつ、実際にはデジタルツイン上で動作させることが可能である。これはデジタルツインの高忠実度により実現され、DUTに実設置時と同種の信号を同速度・同電力レベルで提供する。 マイクログリッドやコミュニティエネルギーシステム(CES)のデジタルツインの文脈では、DUTは通常、SCADAシステム、ビル管理システム(BES)、またはクラウドアグリゲーターであり、あたかも実グリッドであるかのようにデジタルグリッドを制御・運用します。 この手法は、新たな運用戦略の検証、新規グリッドオペレーターの訓練、機器エラーのトラブルシューティング、新機能の評価、あるいは新たなビジネスモデルや新規デバイスの導入に伴う技術的影響の評価など、幅広いケースで有用です。
デジタルツインの種類| デジタルツインが必要な理由
デジタルツインはいくつかの異なる方法で分類されるが、最も単純な分類法の一つは、製品ライフサイクルのどの段階をサポートするかに焦点を当てる方法である。この文脈では、デジタルツインは通常、開発段階向けデジタルツインと運用段階向けデジタルツインのどちらか一方の段階向けに構築される。
開発段階のデジタルツイン(別名:製品または生産デジタルツイン)は、新製品・新サービスの開発、改修、実装プロセスを支援するために設計されています。これには、建設前に計画されたコンポーネントやシステムのデジタルツインプロトタイプを作成することが含まれます。 例えば、既存サイトに新たなグリッド・ストレージバッテリーシステムを設置する場合、バッテリーとインバーターの開発段階デジタルツインにより、対象サイトの実環境下で提案されたコンポーネントがどのように動作するか検証できます。 さらに、電力系統とその構成要素のデジタルツインを作成することで、電気ネットワークに必要な変更をどこでどのように実施できるかを確認できます。HIL(ハードウェア・イン・ザ・ループ)を活用すれば、これらのデジタルツインを動的に動作させ、計画されたシステムがリアルタイムでどのように動作するかを探索できます。これにより、実際のプロトタイプ構築を開始する前に、潜在的な制御や通信の問題をより的確に特定することが可能になります。
一方、運用段階、すなわち性能段階のデジタルツインは、設備の運用・保守(O&M)段階を支援するために設計されています。これらは、既存のコンポーネントやシステムモデルを調整し、実資産をより正確に表現するために、リアルタイムデータと履歴データを中央データベースに収集します。そして、SCADAパネルやビル情報管理(BIM)システムなど、現場管理者が容易に解釈できる形でそれらを提示します。 HIL(ハードウェア・イン・ザ・ループ)を活用すれば、シナリオテストを実施し、現在の状態にある実システムが様々な予期せぬ事象にどう反応するかを確認できます。これは特に、性能テスト、意図しないアイランド化、サイバーセキュリティ堅牢性テストを通じて、グリッド障害が発生する前にそれを特定・回避するのに有用です。また、グリッド障害発生後のトラブルシューティングや分析にも活用でき、グリッドシステムをより迅速に復旧させる潜在的な解決策を素早く見出すことが可能です。 さらに、同じデジタルツインを用いて実データに基づく新たな制御戦略の分析・特性評価が可能となり、システム応答性の向上や新規マイクログリッド運用者の訓練支援にも貢献します。これら全てを、実システムにリスクを負わせることなく実現できます。
モジュール式で垂直統合されたHILソリューションにより、このプロセスはさらに容易になります。 HILモデルは最初からリアルタイム実行を前提に構築されるため、開発段階のモデルを調整し、実稼働データや現場データを収集しながらフィードバックするだけで、開発段階と運用段階の両方で同一のデジタルツインモデルを利用できます。これによりモデルの精度がさらに向上すると同時に、現代の電力系統アプリケーションにおいてリスク軽減に不可欠なあらゆるシナリオテストの利点も提供します。こうしたアプリケーションでは、既存資産を新たな予期せぬ状況下でも安全に制御することが頻繁に求められます。
HILベースのデジタルツイン| デジタルツインを作成するには何が必要ですか?
すべてのデジタルツインはモデルであるが、すべてのモデルがデジタルツインであるわけではない。モデルとデジタルツインの違いは、物理的なデバイスやシステムのエミュレーションの忠実度と精度にあり、デジタルツインの場合、物理的なものと区別がつかないほどである。 これを実現し、正当に「デジタルツイン」と呼べるモデルを作成するには、第一にモデリングに必要な適切な入力データを取得し、第二にその検証に必要な関連データを保有することが必要である。
デジタルツインを作成するための第一の要件は、適切なモデリング入力です。つまり、デジタルツインを作成するモデリングエンジニアは、ツインに含めるべきデバイスとその仕様・動作特性を正確に把握する必要があります。必要な詳細度とデータ入力のレベルは、デジタルツインが果たす目的に依存します。 例えば、マイクログリッドにおける新規資産のサイジング検討(蓄電池システムの最適サイズ選定など)では、既存資産の銘板データ(太陽光パネルの種類、太陽光インバーターの定格出力・効率など)が関連モデリング入力となる。これらは通常、対象資産の取扱説明書末尾の仕様表に記載されている。 一方、統合や試運転前のユースケースでは、インバーターのMODBUSレジスタマップ、バッテリー貯蔵システムのカスタムSunSpecレジスタや機能、あるいはEV充電器のOCPPバージョンなど、通信レイヤーに関する情報も必要となる。 物理システムと同等の通信機能を備えたモデルを作成することで、モデリングエンジニアは真のデジタルツインを構築できます。これにより、SCADAやビル管理システムなどの被試験デバイスから見ると、実際のシステムと全く同じ動作(同一通信設定によるデータ読み書き機能を含む)を実現します。 このモデルを作成するため、モデリングエンジニアは合意されたデジタルツインの目的に基づきデータ仕様書を作成します。関係するステークホルダーは、この仕様書にモデル化対象資産の銘板データ、技術仕様、場合によっては通信レジスタ情報を記入する必要があります。適切な入力データがあれば、モデルは物理デバイスやシステムを正確に再現することが保証されます。
もちろん、モデリングエンジニアなら誰でも「ゴミを入れればゴミが出る」という言葉の重要性を理解している。 この正確なモデルをデジタルツインへと変えるのはモデル検証であり、関連するモデリング入力が関連性のある正確なモデル出力を生み出すことを保証する。デジタルツインの文脈において検証とは、モデルが表現しようとする物理デバイスやシステムの挙動と完全に一致するようモデルを微調整するプロセスである。つまり、対象の条件や入力に対してモデルが実際に有用であることを保証する。 検証の主な要件は、関連する測定値のデータセットである。過去のデータ、あるいは理想的には過去データとリアルタイムデータの両方が望ましい。関連する過去の測定値があれば、モデリングエンジニアは、同じ入力条件・同じ環境下で物理デバイス(またはシステム)と挙動が同一になるまで、モデルを慎重に修正・パラメータ化できる。検証に必要なデータの種類とその粒度は、デジタルツインの目的に依存する。 電力フロー解析や設備規模検討では、15分間隔のデータで通常十分である(例:太陽光発電所における日射量、発電出力など)。 一方、周波数復旧や電力品質サポートなどの補助サービス提供といった時間依存シナリオのエミュレーションでは、秒単位あるいはサブ秒単位の計測データに加え、対象資産からの追加データ(例:充電状態、バッテリーの現行動作モードなど)が必要となる。 デジタルツインの目的が統合の加速にある場合、通信層の検証も必要となる。モデリングエンジニアはMODBUS、CAN、IEC61850等の通信プロトコルを介した測定の適切なスケーリングと測定種別を保証する。 最後に、デジタルツインがマルチフィジックスツインである場合、個別に検証された各モデルが期待通りに連携することを保証するため、追加の第2段階検証が必要となる。例えば、マイクログリッドに熱出力と電力出力を同時にエミュレートする必要があるCHP(熱電併給)が含まれる場合、電力モデルと熱モデルを共同で検証し、完全なエミュレートシステムの測定値が、同一入力条件下の実サイトまたはシステムと統計的に差異がないことを確認しなければならない。
要するに、関連する入力データに基づいてモデルを作成し、関連する過去データやリアルタイム測定値で検証すれば、その目的のためのデジタルツインが完成する。つまり、物理的なデバイスやシステムの挙動と一致するモデルである。次のセクションでは、こうしたデジタルツインが新技術・新サービスの検証と導入において重要な役割を果たす、2つの欧州プロジェクトを詳細に検討する。
クレジット
テキスト | セルジオ・コスタ、アレクサンダル・カヴギッチ
ビジュアル | カール・ミッケイ、ミリツァ・オブラドヴィッチ
編集 | デボラ・サント

「デジタルツインがエネルギー転換を加速させる方法」へのコメントが1件あります
本ブログで共有された知見は、デジタルツインがエネルギー転換を加速し、運用効率を向上させる仕組みを徹底的に理解する手助けとなります。高忠実度シミュレーションとHILテストの活用に関する説明は、複雑なシステムにおける仮想モデリングの実用的な利点を浮き彫りにし、結果の予測と性能の最適化をより容易にします。