Software Releases
We remain committed to our customers but releasing quarterly software updates to enhance functionality,
introduce new features, and address any known issues from client feedback to ensure that users have
the latest and most reliable software available for project success. Learn more about the latest new
features and updates added to our software.


2025.2 Software Release Highlights | What’s New
Typhoon HIL Control Center 2025.2 is now available! In this video, we’ll give you a sneak peek at what’s new in this latest software release, packed with new features and improvements that will help you achieve your HIL project goals, so make sure to download it, give it a run, and let us know what you think! Read more in the video description…

2025.1 Software Release Highlights | What’s New
Typhoon HIL Control Center 2025.1 is now available! In this video, we’ll give you a sneak peek at what’s new in this latest software release, packed with new features and improvements that will help you achieve your HIL project goals, so make sure to download it, give it a run, and let us know what you think! Read more in the video description…

2024.4 Software Release Highlights | What’s new?
Typhoon HIL Control Center 2024.4 is now available! In this video, we’ll give you a sneak peek at what’s new in this latest software release, packed with new features and improvements that will help you achieve your HIL project goals, so make sure to download it, give it a run, and let us know what you think! Read more in the video description…

2024.3 Software Release Highlights | What’s new?
Typhoon HIL Control Center 2024.3 is now available! In this video, we’ll give you a sneak peek at what’s new in this latest software release, packed with new features and improvements that will help you achieve your HIL project goals, so make sure to download it, give it a run, and let us know what you think! Read more in the video description…
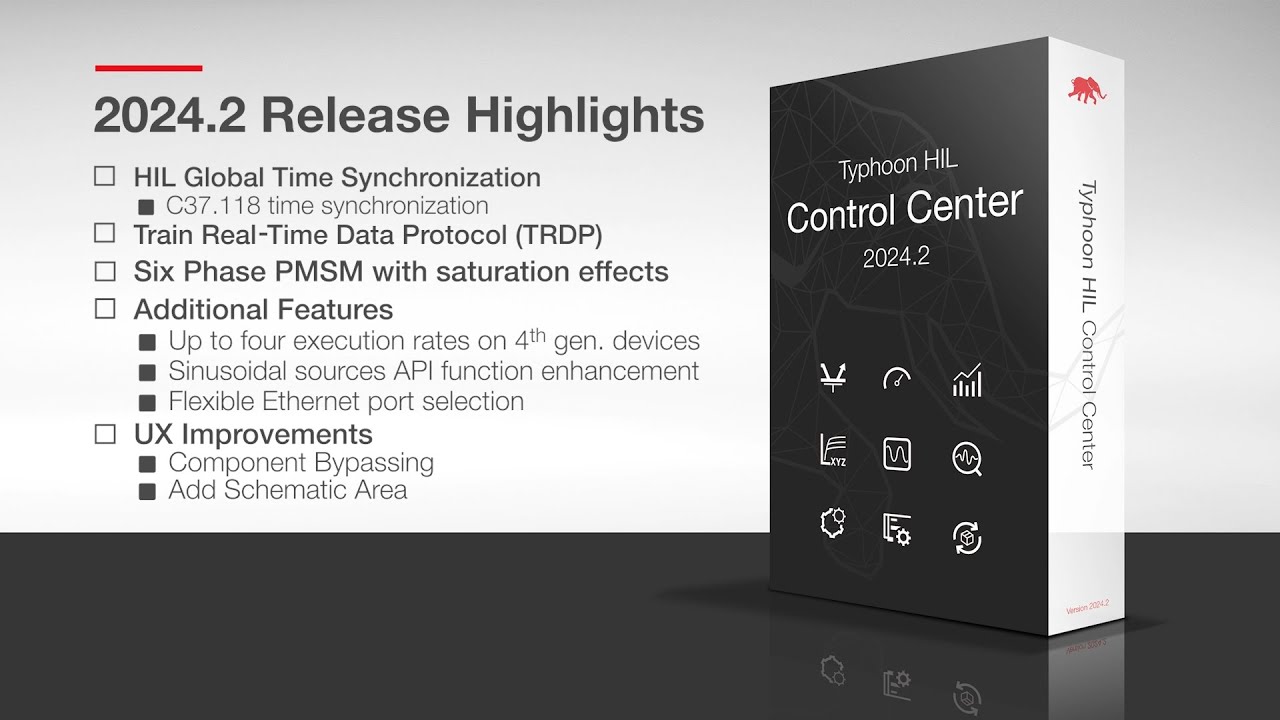
2024.2 Software Release Highlights | What’s new?
Typhoon HIL Control Center 2024.2 is now available! In this video, we’ll give you a sneak peek at what’s new in this latest software release, packed with new features and improvements that will help you achieve your HIL project goals, so make sure to download it, give it a run, and let us know what you think! Read more in the video description…
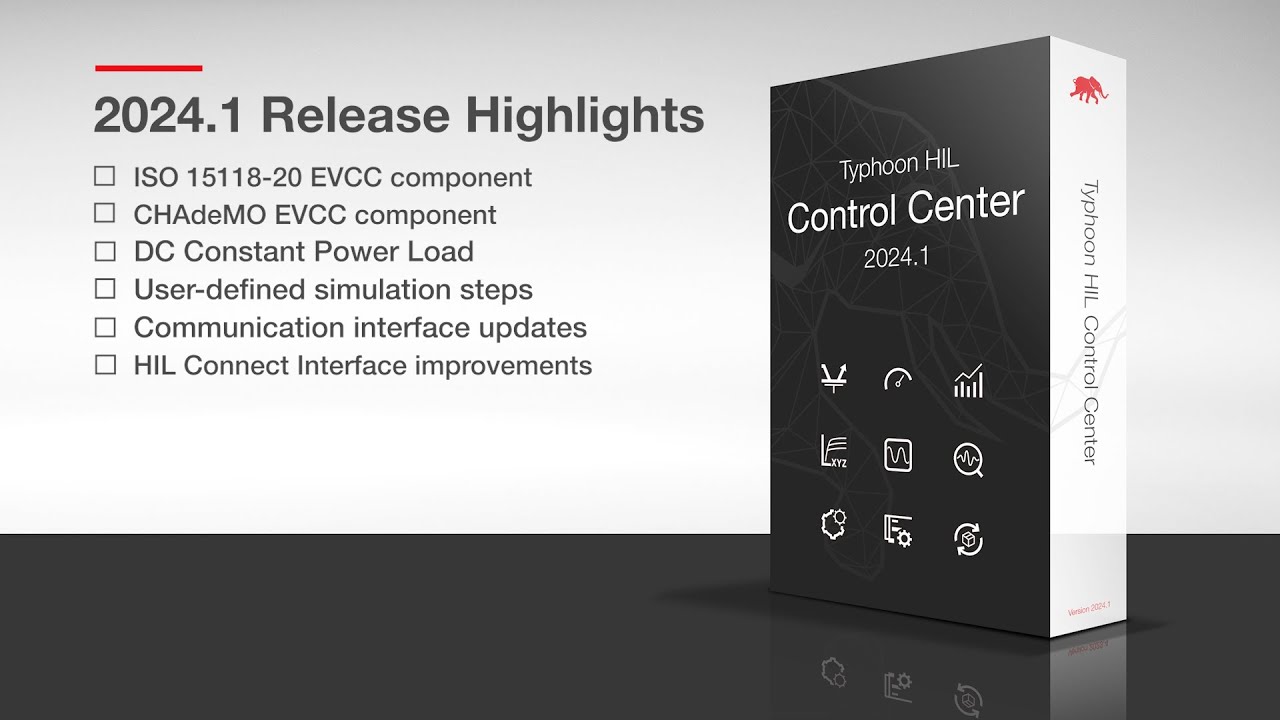
2024.1 Software Release Highlights | What’s new?
Typhoon HIL Control Center 2024.1 is now available! In this video, we’ll give you a sneak peek at what’s new in this latest software release, packed with new features and improvements that will help you achieve your HIL project goals, so make sure to download it, give it a run, and let us know what you think! Read more in the video description…

2023.4 Software Release Highlights | What’s new?
Typhoon HIL Control Center 2023.4 is now available! In this video, we’ll give you a sneak peek at what’s new in this latest software release, packed with new features and improvements that will help you achieve your HIL project goals, so make sure to download it, give it a run, and let us know what you think! Read more in the video description…
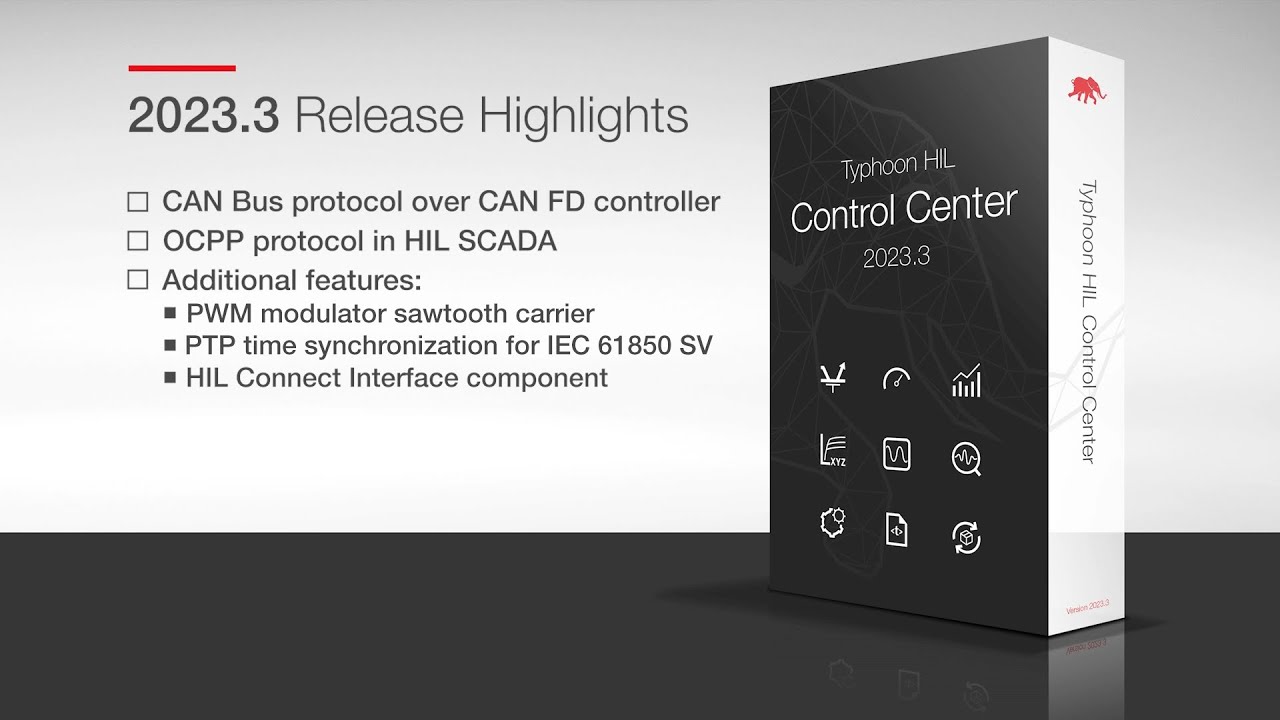
2023.3 Software Release Highlights | What’s new?
Typhoon HIL Control Center 2023.3 is now available! In this video, we’ll give you a sneak peek at what’s new in this latest software release, packed with new features and improvements that will help you achieve your HIL project goals and makes sharing your models, projects, and test results much easier, so make sure to download it, give it a run, and let us know what you think! Read more in the video description…

2023.2 Software Release Highlights | What’s new?
Typhoon HIL Control Center 2023.2 is now available! In this video, we’ll give you a sneak peek at what’s new in this latest software release. This release is packed with new features and improvements that will help you achieve your HIL project goals and makes sharing your models, projects, and test results much easier, so make sure to download it, give it a run, and let us know what you think! Read more in the video description…
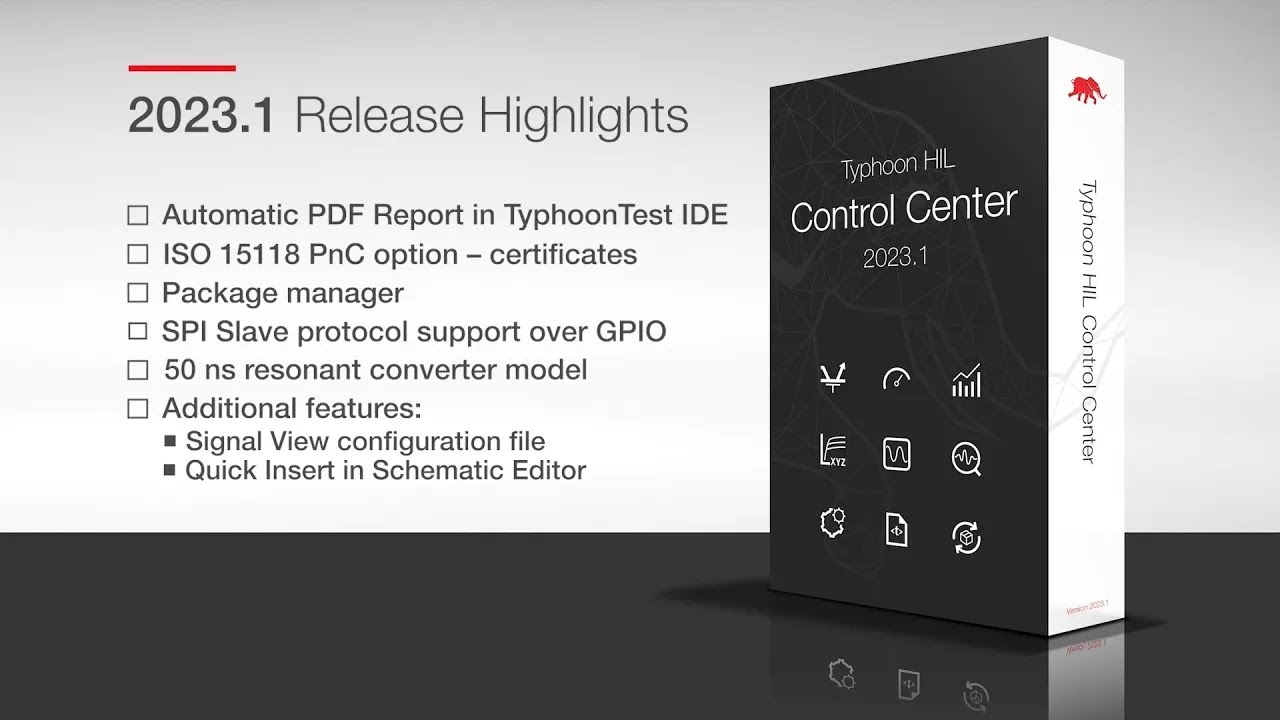
2023.1 Software Release Highlights | What’s New?
This holiday season is all about sharing! In this video, we’ll give you a sneak peek of what’s new in our latest software release, Typhoon HIL Control Center 2023.1. This release is packed with new features and improvements that will help you achieve your HIL project goals and make sharing your models, projects, and test results much easier, so make sure to download it, give it a run, and let us know what you think! Read more in video description…

Easy-to-use testing solution
Typhoon HIL gave us an easy-to-use testing solution for all our usage scenarios. We were really surprised how easy it was to integrate Typhoon HIL into our research workflow. These units have greatly improved our testing and development times and have been a great asset in our lab.