DEGOV Woodward Diesel Governor
Description of the DEGOV Woodward Diesel Governor in Schematic Editor, which is used as a standard model for diesel engine governors.
Component Icon
Note: This component requires an active Grid Resources functional library license for real-time simulation.
Description
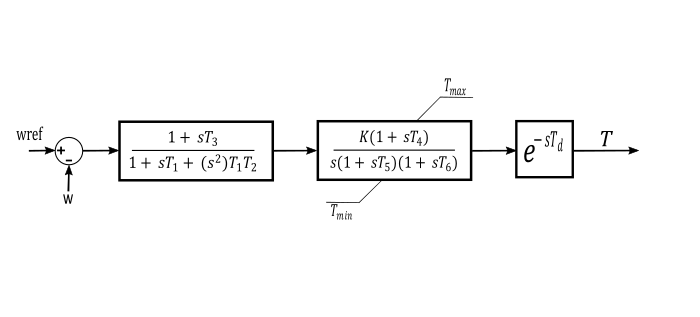
The DEGOV Governor model is a standard model for diesel engine governors, usually used in power system simulation studies. It is often used in transient modeling of diesel electric generators. A block diagram of the DEGOV Woodward Diesel Governor component is shown in Figure 2, where you can find equations for the transfer functions used in the model.
Ports
- w_ref(in)
- Angular reference speed (in pu).
- Supported types: uint, int, and real.
- Vector support: no.
- Angular reference speed (in pu).
- w (in)
- Angular speed (in pu).
- Supported types: uint, int, and real.
- Vector support: no.
- Angular speed (in pu).
- T (out)
- Torque output (in pu).
- Supported types: real.
- Vector support: no.
- Torque output (in pu).
Properties
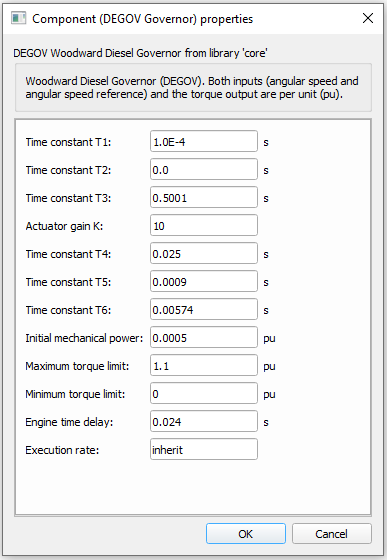
- Time constants T1, T2, T3
- Type in the values of the time constants T1, T2, and T3 associated with the Electric Control Box.
- Actuator gain
- Type in the value of the gain K, associated with the Actuator.
- Time constants T4, T5, T6
- Type in the values of the time constants T4, T5, and T6 associated with the Actuator.
- Initial mechanical power
- Type in the value of the initial mechanical power Pm0.
- Maximum and minimum torque limit
- Type in the values for the upper, Tmax, and lower Tmin, limits of the output torque in pu.
- Engine time delay
- Type in the time delay, Td of the Engine.
- Execution rate
- Type in the desired signal processing execution rate. This value must be compatible with other signal processing components of the same circuit: the value must be a multiple of the fastest execution rate in the circuit. There can be up to four different execution rates. To specify the execution rate, you can use either decimal (e.g. 0.001) or exponential values (e.g. 1e-3) in seconds. Alternatively, you can type in ‘inherit’ in which case the component will be assigned execution rate based on the execution rate of the components it is receiving input from.