Communication
Summary of the Communication components available in Schematic Editor
Communication components
This page highlights the dedicated subset of Communication components which are available through the Library Explorer in Schematic Editor. These components allow you to configure and accept inputs into your model during run-time from a software or device using the specified protocol. Their descriptions and supported features are given in Table 1.
Note: Many of the featured components are only available with the Communication Toolbox
Package. Please refer to our Typhoon HIL Toolboxes page for more
information.
Note: In addition to the protocols described below, Typhoon HIL
also supports several proprietary protocols through dedicated agreement. Please refer to our
Proprietary Protocols page for more information.
| Component | Core Application Area(s) | Description | Supported Devices | Features | Example Model (\examples\models\) | ||
|---|---|---|---|---|---|---|---|
| supported input types | supported output types | vector support | |||||
 |
General/Automation; Energy | Implements Modbus TCP server functionality. | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | real, int, uint | real | yes | communication protocols\modbus\ (Application Note) (several models are available) |
 |
Implements Modbus TCP client functionality. | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | real, int, uint | uint | yes | ||
 |
Energy | Implements Modbus SunSpec server functionality. | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | real, int, uint | real | no | communication protocols\sunspec modbus\ (Application Note) |
 |
Energy | Implements IEC 61850 MMS server functionality. | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | real, int, uint | real, int, uint | no | communication protocols\iec 61850 mms pv inverter\ (Application Note) |

|
Energy | Implements IEC61850 GOOSE publisher functionality. | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | real | real | yes | communication protocols/iec 61850 goose/ |

|
Implements IEC61850 GOOSE subscriber functionality. | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | real | real | yes | ||
 |
Energy | This block defines common SV protocol settings. | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | - | - | - | /communication protocols/iec 61850 sampled values/ sv exchange between 2 hils |
 |
Implements IEC61850 SV publisher functionality. | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | real, int, uint | - | yes | /communication protocols/iec 61850 sampled values/ send | |
 |
Implements IEC61850 SV subscriber functionality. | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | - | real, int, uint | yes | /communication protocols/iec 61850 sampled values/ receive | |
 |
Energy | This block defines common IEC 61869 SV protocol settings. | HIL101, HIL404, HIL506, and HIL606 | - | - | - | /communication protocols/iec 61869 sampled values/iec 61869 sv exchange between 2 hils |
 |
Implements IEC 61869 SV publisher functionality. | HIL101, HIL404, HIL506, and HIL606 | real, int, uint | - | yes | /communication protocols/iec 61869 sampled values/iec 61869 send | |
 |
Implements IEC 61869 SV subscriber functionality. | HIL101, HIL404, HIL506, and HIL606 | - | real, int, uint | yes | /communication protocols/iec 61869 sampled values/iec 61869 receive | |
 |
General/Automation | Implements EtherCAT slave functionality. | HIL506 and HIL606 | real, int, uint | real, int, uint | yes | /communication protocols/ethercat/ ethercat slave |
 |
Implements EtherCAT master functionality. | HIL101, HIL404, HIL506, and HIL606 | real, int, uint | real, int, uint | no | /communication protocols/ethercat/ ethercat master | |
 |
General/Automation | The block defines common Ethernet Variable Exchange protocol settings. | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | - | - | no | /communication protocols/ethernet variable exchange/ (TCP/IP and UDP examples available for HIL to PC, PC to HIL, and multi-HIL applications) |
 |
Transmits data over Ethernet (TCP or UDP) using the Ethernet Variable Exchange protocol. | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | real, int, uint | - | yes | ||
 |
Receives data over Ethernet (TCP or UDP) using the Ethernet Variable Exchange protocol. | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | - | real, int, uint | yes | ||
 |
General/Automation | The SFP Setup component configures the SFP Simulation Link interface. | HIL101, HIL404, HIL506 and HIL606 | - | - | no | communication protocols\sfp with mmc\ (Application Note) |
 |
Transmits data over SFP using the SFP Simulation Link protocol. | HIL101, HIL404, HIL506 and HIL606 | real, int, uint | - | no | ||
 |
Receives data over SFP using the SFP Simulation Link protocol. | HIL101, HIL404, HIL506 and HIL606 | - | real, int, uint | no | ||
 |
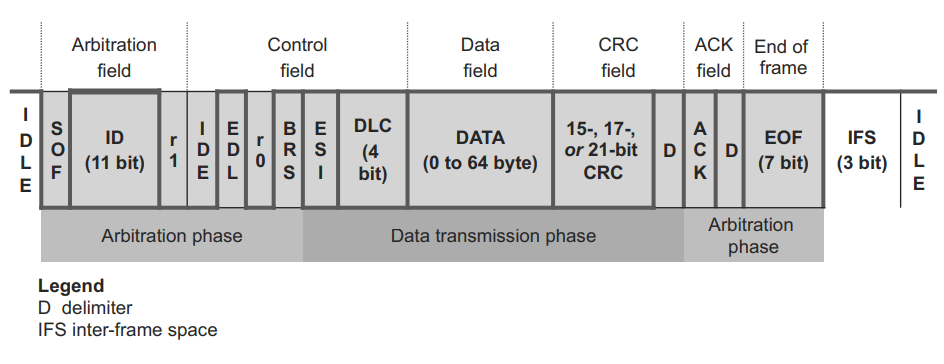
General/Automation; Energy; Automotive | This component configures CAN controller settings. | HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | - | - | no | communication protocols\can bus\ |
 |
This component is used to specify the format and values of a single CAN message to be sent. | HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | real, int, uint | - | no | ||
 |
This component is used to unpack a single message received through a CAN network. | HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | - | real, int, uint | no | ||
|
|
General/Automation; Energy; Automotive | This component configures CAN controller settings. | HIL506 and HIL606 | - | int | no | communication protocols\can fd\ |
 |
This component is used to specify the format and values of a single CAN FD message to be sent. | HIL506 and HIL606 | real, int, uint | - | no | communication protocols\can fd\can fd loopback\ | |
 |
This component is used to unpack a single message received through a CAN FD network. | HIL506 and HIL606 | - | real, int, uint | no | ||
 |
This component is used to convert physical signals into raw data ready for CAN network transmission. | HIL506 and HIL606 | real, int, uint | real, int, uint | no | communication protocols\can fd\can fd raw loopback\ | |
 |
This component is used to convert raw data received from the CAN network into physical signal values. | HIL506 and HIL606 | real, int, uint | real, int, uint | no | ||
 |
This component is used to transmit raw data to the CAN network. | HIL506 and HIL606 | real, int, uint | real, int, uint | no | ||
 |
This component is used to receive raw data from the CAN network. | HIL506 and HIL606 | real, int, uint | real, int, uint | no | ||
 |
Automotive | This component specifies the format and values of a single J1939 message to be sent. | HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | real, int, uint | real, int, uint | no | - |
 |
This component is used to unpack a single J1939 message received through a CAN network. | HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | real, int, uint | real, int, uint | no | - | |
 |
This component is used to handle address arbitration for the J1939 protocol. | HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | no | - | |||
 |
General/Automation; Energy; Automotive | This component implements CANOpen slave functionality. | HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | real, int, uint | real | no | - |
 |
Energy | This component implements data sending according to the IEEE C37.118 protocol. | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | real, int, uint | - | yes | communication protocols\ieee c37.118\ (Send, Receive, and multi-HIL models available) |
 |
This component implements data receiving according to the IEEE C37.118 protocol. | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | - | real, int, uint | yes | ||
 |
General/Automation | This component implements OPC UA server functionality. | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, HIL606, and VHIL | real, int, uint | real, int, uint | yes | communication protocols\opc ua\ (Application Note) (SCADA client, Server with certificates, and Server available) |
 |
General/Automation; Energy | Implements DNP3 Outstation functionality. | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | real, int, uint | real, int, uint | yes | communication protocols\dnp3 |
 |
General/Automation; Energy | Implements CIP - EtherNET/IP Server functionality | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | real, int, uint | real, int, uint | no | communication protocols\cip\ethernet-ip server |
 |
General/Automation | This block defines common Serial protocol (UART) settings. | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | - | - | no | communication protocols\serial (Schematic Editor and HIL SCADA implementations available) |
 |
Transmits data over the RS232 port. | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | real, int, uint | - | yes | ||
 |
Receives data from the RS232 port. | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | - | real, int, uint | yes | ||
 |
General/Automation | Implements ABB Powerlink protocol over GPIO (up to 4 channels per device). | HIL101, HIL404, HIL506, and HIL606 | int, uint | int, uint | no | - |
 |
General/Automation | Implements ABB DDCS protocol over GPIO. | HIL101, HIL404, HIL506, and HIL606 | int, uint | int, uint | no | - |
 |
General/Automation | Implements IO Device functionality according to the PROFINET protocol. | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | real, int, uint | real, int, uint | yes | - |
 |
Energy | Implements IEC60870 Server functionality. | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | real, int, uint | real, int, uint | yes | - |
 |
General/Automation | This component communicates with Egston power amplifiers using the SFP interface. | HIL101, HIL404, HIL506, and HIL606 (via custom firmware configuration only) | real, int, uint | real, int, uint | no | - |
 |
General/Automation; Energy; Automotive | Implements ISO 15118-2 Protocol for Electric Vehicle Communication Controllers (EVCC). | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | real, int, uint | real, int, uint | no | communication protocols\iso 15118\ electric vehicle charge controller |
 |
General/Automation; Energy; Automotive | Implements ISO 15118-2 Protocol for Supply Equipment Communication Controllers (SECC). | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | real, int, uint | real, int, uint | no | - |
 |
General/Automation; Energy; Automotive | Implements ISO 15118-20 Protocol for Electric Vehicle Communication Controllers (EVCC). | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | real, int, uint | real, int, uint | no | - |
 |
General/Automation; Energy; Automotive | Implements ISO 15118-20 Protocol for Supply Equipment Communication Controllers (SECC). | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | real, int, uint | real, int, uint | no | - |
 |
Automotive | Implements CHAdeMO 1.0 Protocol for Electric Vehicle Communication Controllers (EVCC). | HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | real, int, uint | real, int, uint | no | - |
 |
General/Automation; Energy; Automotive | Implements DIN 70121 Protocol for Electric Vehicle Communication Controllers (EVCC). | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | real, int, uint | real, int, uint | no | |
 |
General/Automation; Energy; Automotive | Implements SPI Slave functionality | HIL101, HIL404, HIL506, and HIL606 | real, int, uint | real, int, uint | no | communication protocols\spi\spi slave |
 |
General/Automation; Energy; Automotive | Implements LIN Slave functionality | HIL101, HIL404, HIL506, and HIL606 | real, int, uint | real, int, uint | no | communication protocols\lin bus\lin slave |
 |
General/Automation; Energy; Automotive | Implements SENT Transmit functionality | HIL101, HIL404, HIL506, and HIL606 | uint | uint | no | - |
 |
General/Railway | This component implements TRDP protocol (IEC 61375-2-3) to Publish PD messages | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | real, int, uint | real, int, uint | yes | communication protocols\iec 61375 trdp\ |
 |
This component implements TRDP protocol (IEC 61375-2-3) to Subscribe to PD messages | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | real, int, uint | real, int, uint | yes | communication protocols\iec 61375 trdp\ | |
 |
General/Automation | Transmits data over Ethernet using UDP. | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | real, int, uint | - | yes | |
 |
General/Automation | Receives data over Ethernet using UDP. | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | - | real, int, uint | yes | |
 |
General/Automation | Receives multicast messages over Ethernet using UDP. | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | - | real, int, uint | yes | |
 |
General/Automation | Transmits data over Ethernet using TCP. | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | real, int, uint | - | yes | |
 |
General/Automation | Receives data over Ethernet using TCP. | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | - | real, int, uint | yes | |
 |
General/Automation; Energy; Automotive | This component configures CAN controllers on the Automotive Communication Extender board. | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | - | int | no | - |
 |
General/Automation; Energy; Automotive | This component configures SPI controllers on the Automotive Communication Extender board. | HIL402, HIL101, HIL404, HIL602+, HIL604, HIL506, and HIL606 | - | int | no | - |
 |
General/Automation; Energy; Automotive | This component configures LIN controller on the Automotive Communication Extender board. | HIL101, HIL404, HIL506 and HIL606 | - | int | no | - |
 |
General/Automation; Energy; Automotive | This component configures SENT controller on the Automotive Communication Extender board. | HIL101, HIL404, HIL506 and HIL606 | - | int | no | - |