ABB DDCS
Description of ABB DDCS protocol implementation in the Typhoon HIL toolchain.
ABB DDCS in the Typhoon HIL toolchain
DDCS (Distributed Drive Communication System) is an ABB proprietary communication protocol designed for high speed communication needs of AC drives. The protocol supports functions such as reading and writing parameters, giving reference values and reading diagnostics. The Typhoon HIL implementation of the ABB DDCS protocol works over GPIO pins on the HIL device.
| Component | Dialog window |
|---|---|
 |
  |
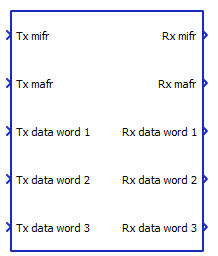
| Port | Description |
|---|---|
| Tx/Rx mifr | 8 bit minor function code to be transmitted/received. |
| Tx/Rx mafr | 8 bit major function code to be transmitted/received. |
| Tx/Rx data word | 16 bit data word to be transmitted/received. |
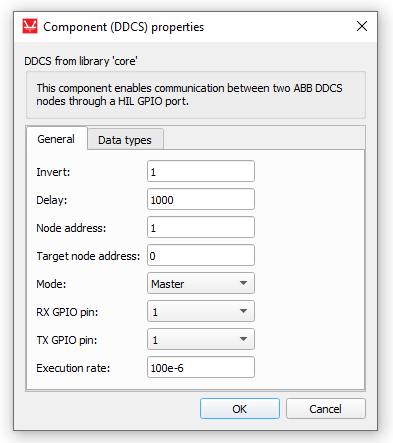
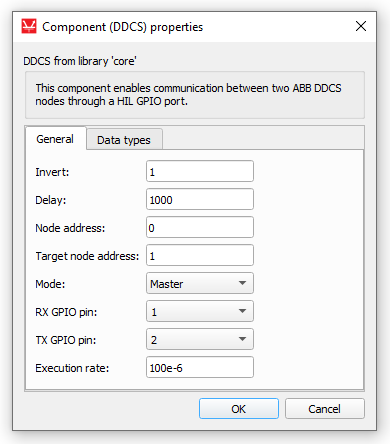
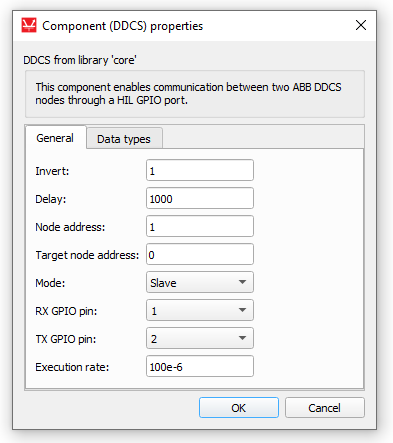
| Parameter | Description |
|---|---|
| Invert | If set to 1 inverts input and output signals. |
| Delay | Delay (µs) between receiving data and sending the response. Minimum delay value is 10µs. |
| Node address | Address of this component. |
| Target node address | Address of the component data is being sent to. |
| Mode | Choice between Master and Slave operation. |
| RX/TX pins | Configure which GPIO pins map to DDCS TX and RX. |
| Execution rate | Signal processing execution rate. |
Connectivity
In order to connect the HIL device to the DDCS network, optical converters are used. Converters are connected to the HIL GPIO, converting HIL input and output signals to optical signals, as shown in Figure 1, Figure 2 and Figure 3.
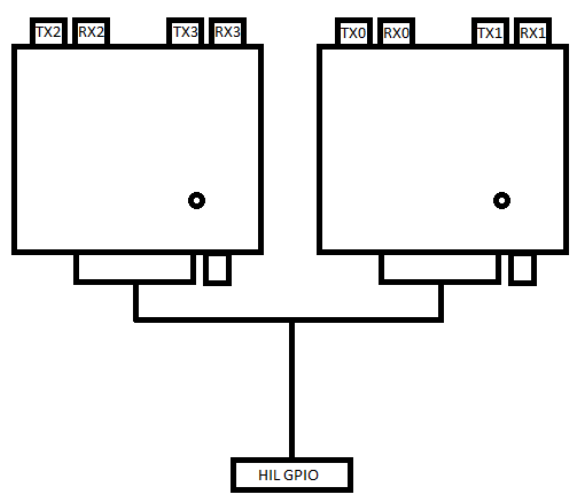
The order of hardware connections inside the converter GPIO connector shown in Figure 3 is as follows:
- GPIO 1 → RX0
- GPIO 2 → TX0
- GPIO 3 → RX1
- GPIO 4 → TX1
- GPIO 5 → RX2
- GPIO 6 → TX2
- GPIO 7 → RX3
- GPIO 8 → TX3