How-to use the Frequency response widget
Demonstration on how to use the Frequency Response widget in HIL SCADA
Introduction
The Frequency Response widget in HIL SCADA provides a way to tune the controller and measure the system small signal performance on the fly without starting a new simulation every time. This can be used to complement time domain analysis on your model.
Model description
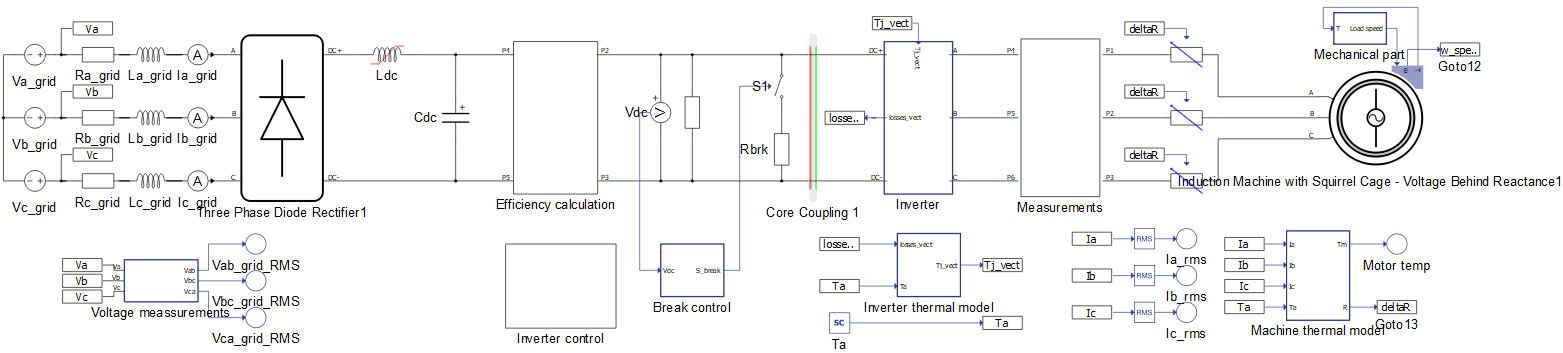
This example builds upon one of the Induction Machine speed control examples. It demonstrates one way the widget can be used to tune and enhance control performance by measuring loop gains and sensitivity transfer functions. The model is shown in Figure 1.
Modifying the speed controller for frequency response
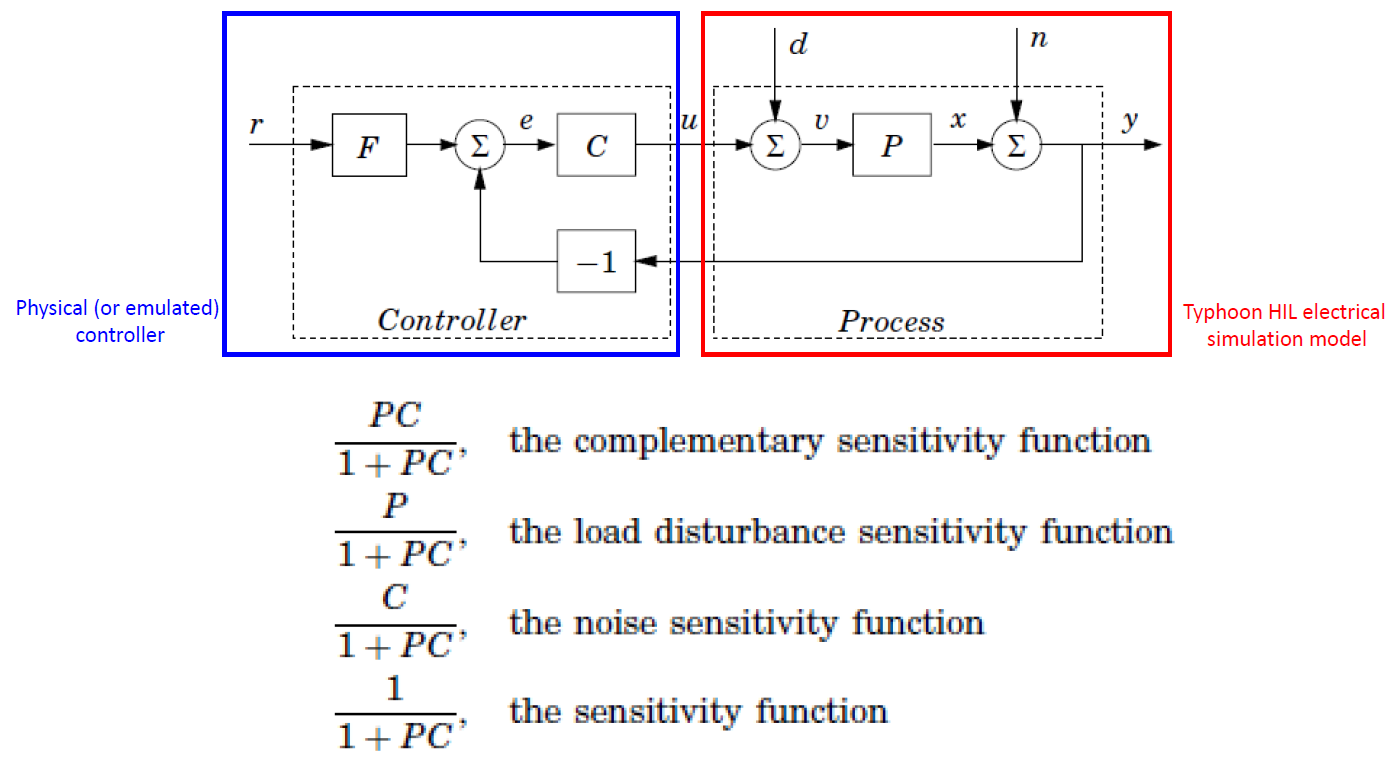
The simple control system illustration in Figure 2 defines some of the relevant system transfer functions for this example.
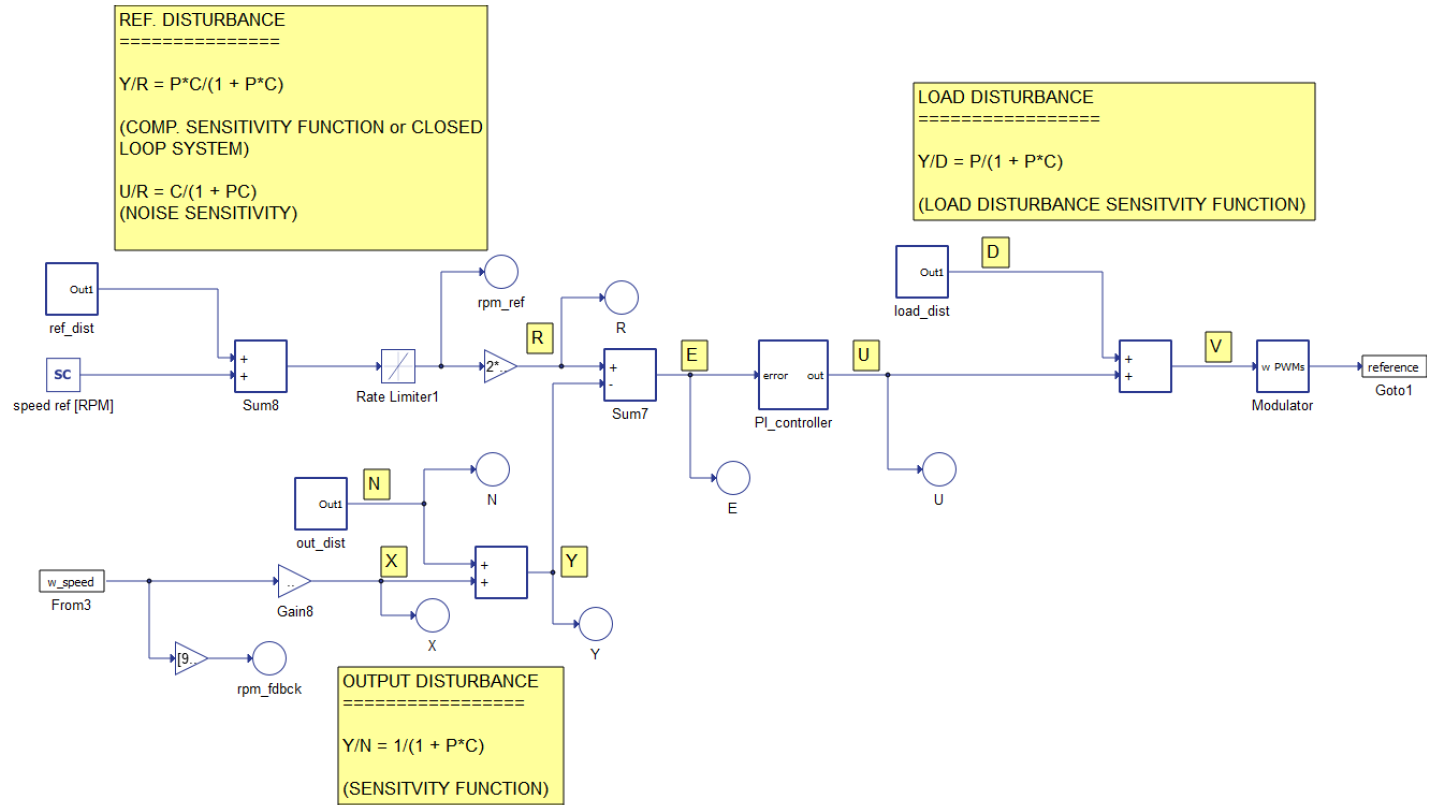
After including a disturbance and some measurement signals, the modified control system is shown in Figure 3, showing inputs for reference disturbance, load disturbance, and output disturbance.
Simulation
After compiling the model and loading the custom SCADA interface, the Frequency Response widget should be visible. By double clicking on the widget, we can view the Frequency Response settings (Figure 4).
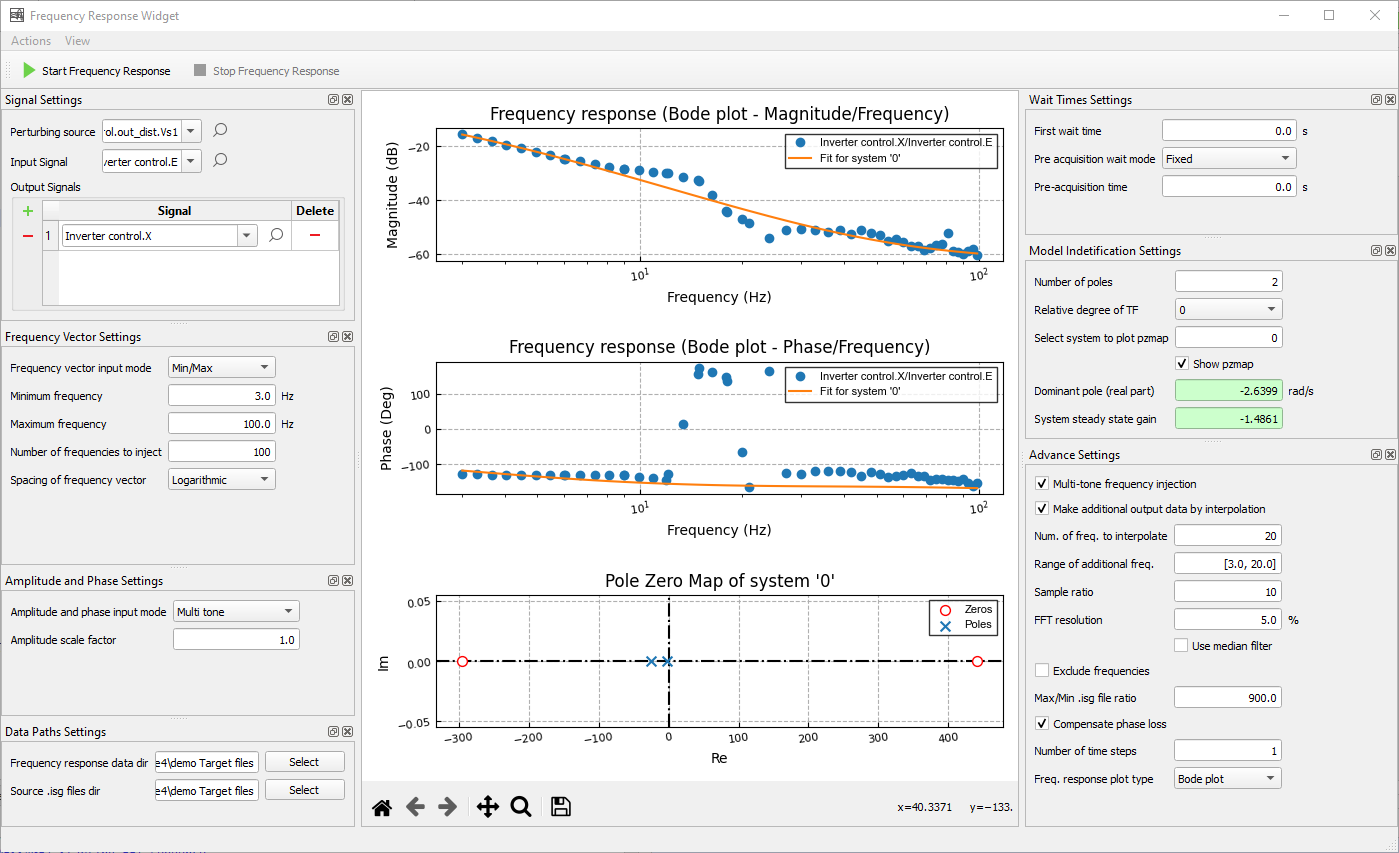
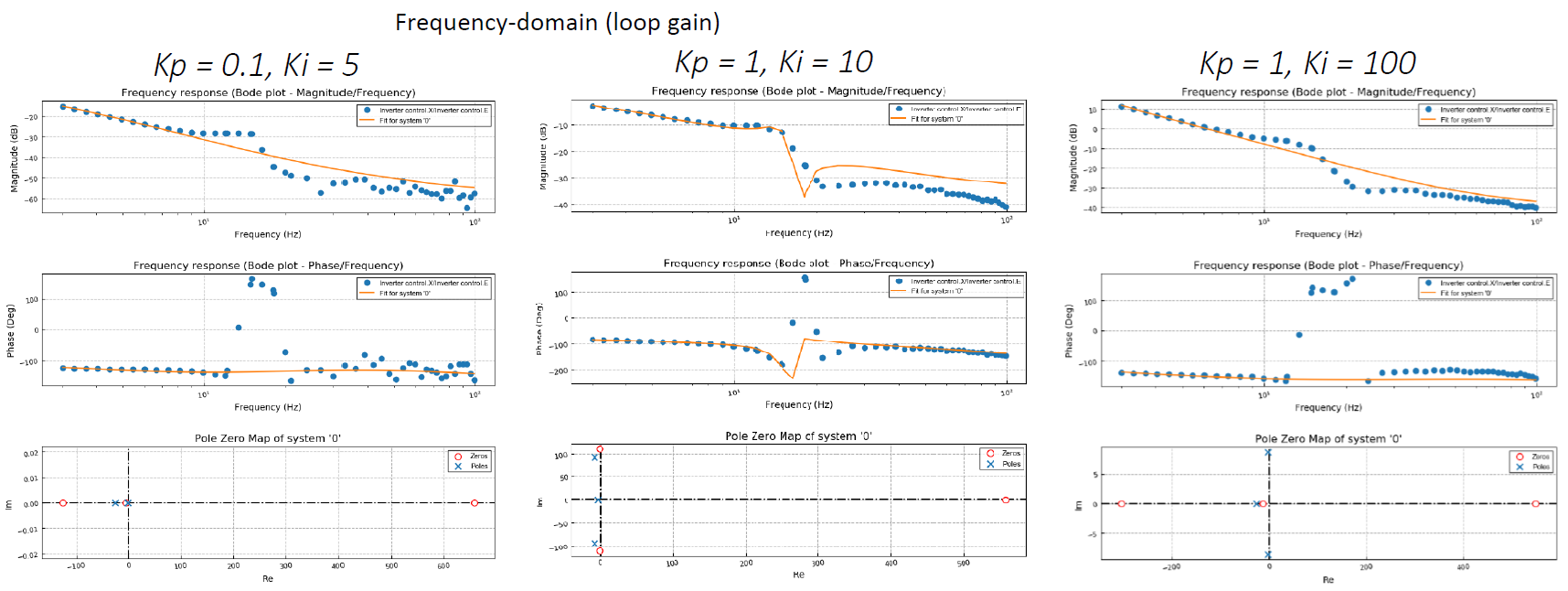
Ensuring high open loop gain is a common method used to improve the system closed loop performance. Referring to this example, the loop gain is the negative of the transfer function represented by "X/E". To measure loop gain, set the perturbing source as "Inverter control.out_dist.Vs1", the input signal as "Inverter control.E", and the output as"Inverter control.X". Figure 5 shows the negative loop gain for 3 different combinations of Kp and Ki. In general, a higher loop gain increases the speed of response at the expense of reducing stability margins (more oscillations).
The sensitivity transfer function complements the loop gain. To obtain the sensitivity frequency response, select the input as "N" and output as "Y". In general, the sensitivity peak should be between 1.0 dB and 2.1 dB for a balance between performance and sensitivity. Also the sensitivity should ideally be low at low frequency so that the closed loop system can track slow-moving reference correctly.
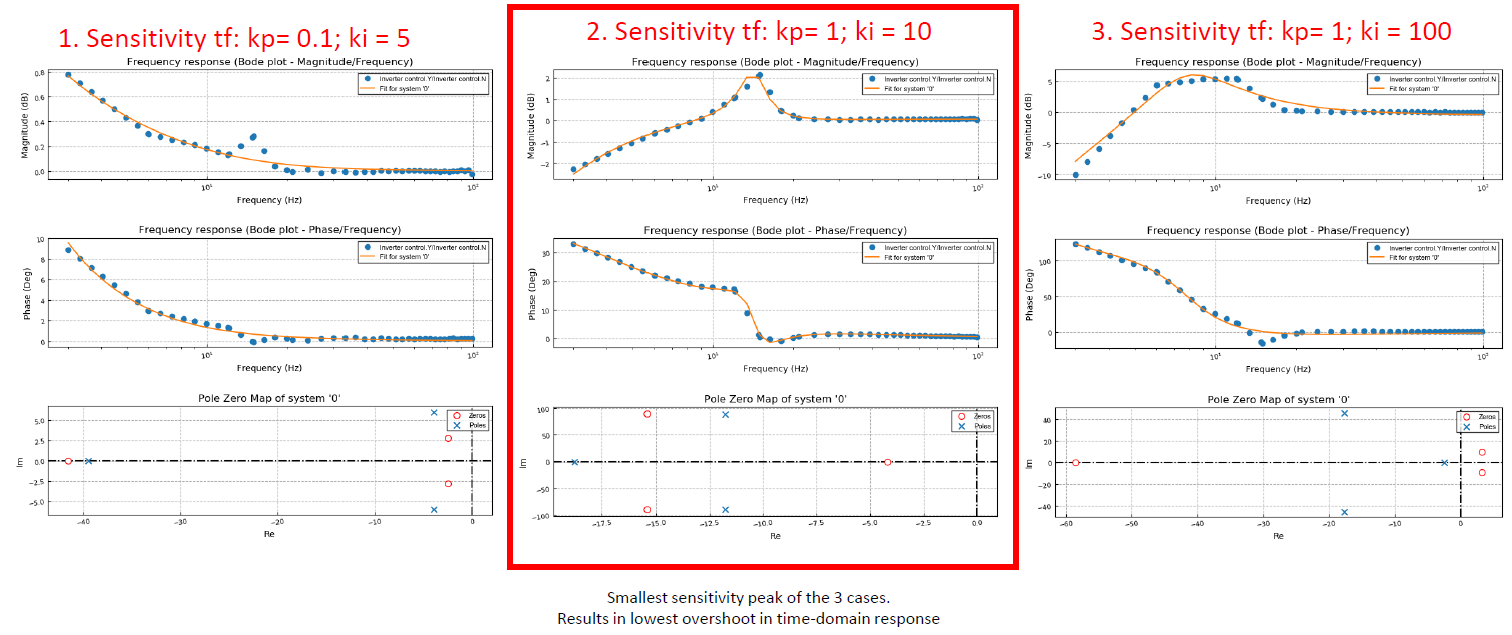
Based on the sensitivity analysis, Kp = 1 and Ki = 10 show adequate performance with a peak of about 2.1 dB around 15 Hz. This result can be confirmed by time-domain analysis. As shown in Figure 7, using step responses at different Kp and Ki parameters, we can confirm that Kp = 1 and Ki = 10 provides the best balance between the speed of response and damping as predicted by the frequency response.

Authors
[1] Simisa Simic