はじめに
パワーエレクトロニクスの制御システムを構築した経験がある方なら、最も苦労するのは最初のコントローラを記述することではなく、実際のハードウェアが揃ってからエッジケースを発見することだとお分かりでしょう。 本記事では、Typhoon HILリアルタイムシミュレータ「HIL506」を用いて、系統連系型ハイブリッドインバータ制御システム(複数のPV入力+エネルギー貯蔵装置+4レッグ三相インバータ)がどのように開発・検証されたかを解説します。その目的は、電力変換、系統同期、およびエネルギー管理を早期に検証することで、ハードウェアの立ち上げをより迅速かつ安全に行い、予期せぬトラブルを大幅に減らすことにあります。
主なポイント:
- ハードウェア・イン・ザ・ループ(HIL)により、実際のコントローラを、高忠実度のリアルタイムプラントモデルに対して動作させることができます。これは、実際のハードウェアがまだ存在しない段階で行われます。
- 閉ループHILテストにより、安全な故障注入、迅速なチューニング、および決定論的なタイミング検証が可能となり、スケジュール上のリスクや統合リスクを低減します。
- Typhoon HIL は、制御アルゴリズムの迅速な開発と評価を可能にし、それによってスケジュール上のリスクや統合リスクを大幅に低減します。
システムの概要
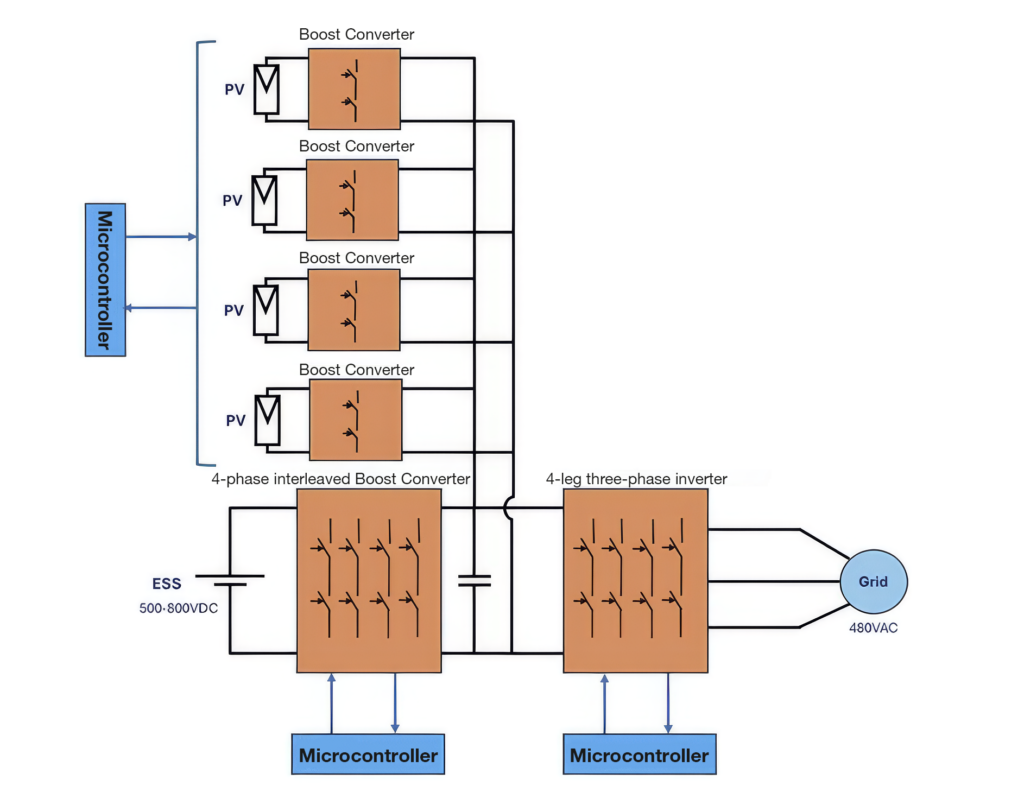
本プロジェクトは、太陽光発電(PV)入力、エネルギー貯蔵システム(ESS)、および電力系統という3つのエネルギー領域を連携させるよう設計された、系統連系型ハイブリッドインバータを中核としています。そのアーキテクチャ(図1)は、意図的にモジュール式かつ拡張性のある設計となっており、共通の直流(DC)および交流(AC)インターフェースを共有しつつ、各エネルギー入力を個別に制御することが可能です。
DC側では、各PV電源が専用のDC-DC変換段に接続されています。この「電源ごとに1つの変換段」というアプローチにより、各チャネル間で干渉が生じることなく、独立したPV制御(および将来のバージョンでは、独立したMPPT戦略)を容易に適用できます。その後、出力はインターリーブ方式のDC-DC変換段を通じて合流され、共有DCバスを安定化させるとともに、動的性能を向上させます。
ESSはDCリンクに接続され、双方向の電力流れを可能にしています。実際には、これにより蓄電システムは余剰太陽光発電電力を吸収し、過渡現象を平滑化し、系統や太陽光発電の状況が急変した際の電力バランスの調整に貢献します。
AC側では、三相インバータが系統電流を完全に制御します。これは、堅牢性や予測可能な電流制御が重要な、系統連系やマイクログリッドのシナリオに最適です。
制御は、専用のデジタルコントローラに分担されています。1つはDC側の変換とエネルギー管理を担当し、もう1つはAC側の系統連系を担当しています。
この分割により、各チームはサブシステムを並行して開発・テストすることができます。パワーステージ全体はHIL506上でリアルタイムにモデル化・実行されるため、高出力のプロトタイプに安全に電力を供給できるようになるずっと前から、実際のコントローラハードウェアを現実的な動作条件下で閉ループテストすることができます。
ハードウェア・イン・ザ・ループが、コントローラ開発の常識を一変させる理由
オフラインシミュレーションは入門には最適ですが、多くの場合、単純化(あるいは平均化)されたモデルに依存しているため、実際の運用で制御系を機能不全に陥らせるような挙動――タイミングのばらつき、飽和効果、非線形性、そして予測不可能なグリッドイベントなど――を見逃しがちです。そのため、チームはハードウェアが到着して初めて「興味深い問題」に気づくことがよくあります。
Typhoon HIL、コントローラはシミュレーションブロックではなく、出荷予定のファームウェアを実際に実行している実機のターゲットハードウェアそのものです。このコントローラは、インバータ、電源、蓄電装置、および電力系統をリアルタイムかつ高精度にシミュレートした環境に接続されています。これにより、初期段階での高出力試験に伴う安全上のリスク(やコスト)を伴わずに、現実に極めて近い閉ループ挙動を得ることができます。
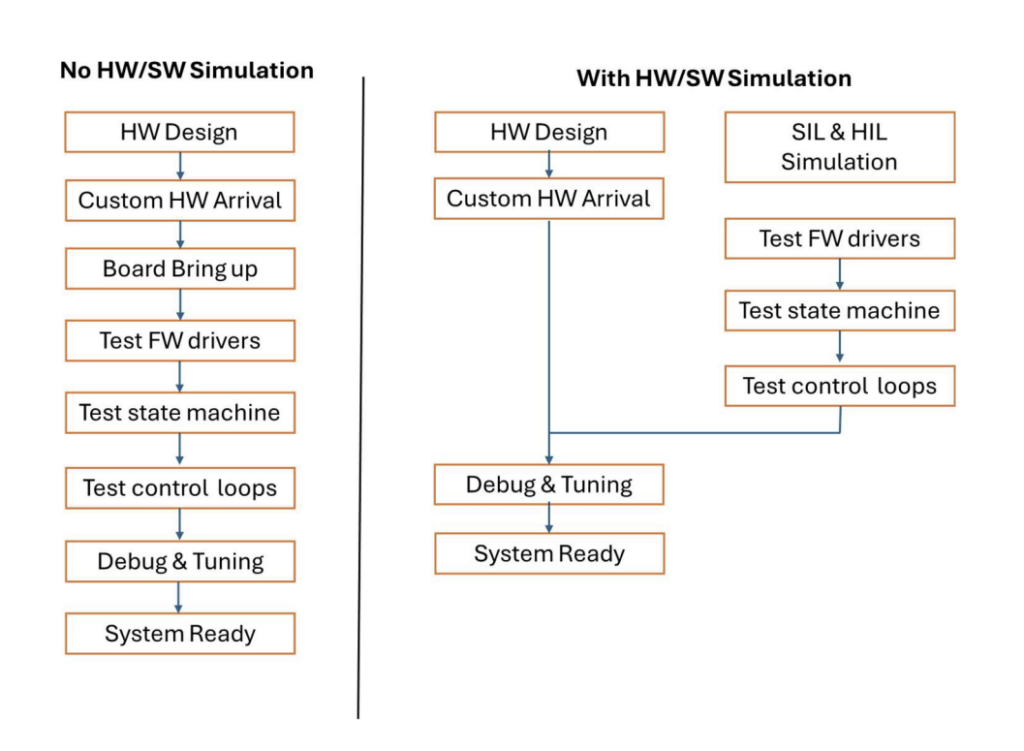
実用面での最大のメリットは並列化です。ハードウェアとソフトウェアの開発が、もはや互いに待ち合う必要がなくなりました。このワークフロー(図2)において、HILは以下の機能をサポートしています:
- ステートマシン、シーケンス、および保護機能の早期デバッグ
- 再現性のある条件下における制御ループのチューニングの高速反復
- 系統障害および故障事象の安全な試験
- 決定論的タイミング検証(コントローラを実際の制約条件下で実行する)
HIL506のセットアップがどのように構築されたか
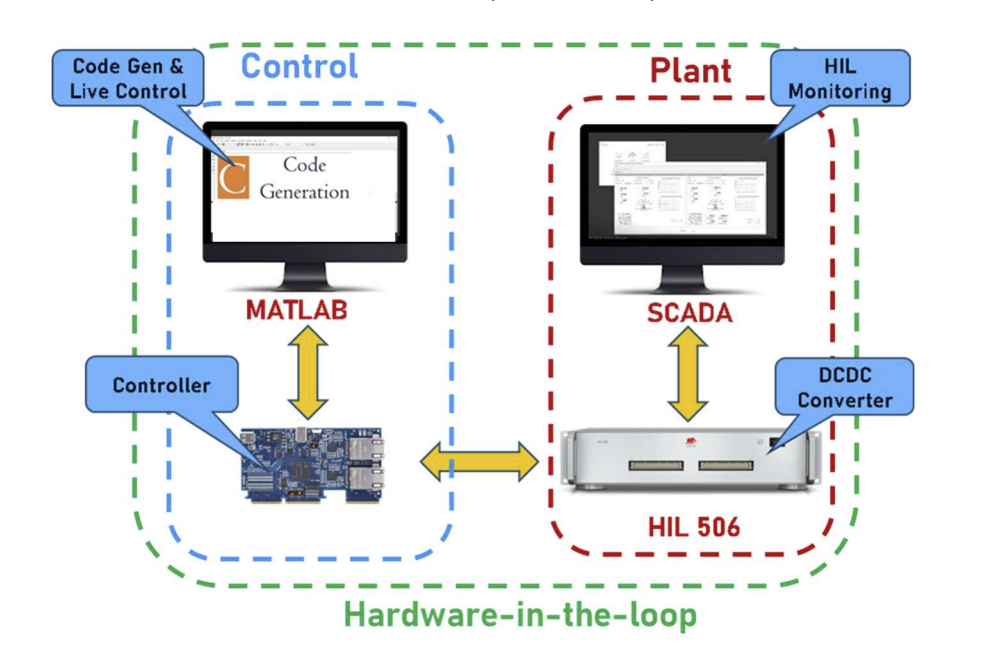
ハイブリッドインバータのHIL環境の構築は、シンプルな考え方に基づいて行われました。それは、コントローラとプラントを明確に分離しつつ、リアルタイムI/Oで接続することで、閉ループが実際のシステムと同様に動作するようにするというものです。図3は、Typhoon HILHIL506で使用される全体アーキテクチャを示しています。
コントローラ側:制御アルゴリズムは、モデルベース設計フローを用いて作成され、コード生成の準備が整えられ、ターゲットとなるコントローラハードウェアに展開されました。これが重要なのは、実際の実行順序やタイミング制約が維持されるためです。これらはまさに、オフラインシミュレーションとハードウェアの間で差異が生じやすい点なのです。
プラント側:電力変換段(DC-DCフロントエンドおよび系統連系インバータ)は、HIL506上でモデル化され、リアルタイムで実行されました。プラントがシミュレーションされているため、高出力機器に通電することなく、内部変数や高速な電気的動的挙動を安全に監視することができます。
閉ループ相互作用:コントローラは 、リアルタイムのプラントモデルに対してゲートコマンドと参照値を出力し、HILはシミュレーションによるフィードバック信号(電流、電圧、状態)をコントローラに返します。この双方向ループにより、動作モードを横断して、制御ロジック、保護機能、およびシステムレベルの相互作用を幅広く検証することが可能となりました。
その結果、通常は順次に行われるタスク――ファームウェア開発、統合テスト、チューニング、さらには障害検証に至るまで――をより早期に開始し、より迅速に進めることができるようになります。これにより、開発効率が向上し、技術的なリスクが低減され、最終的にHILからプロトタイプへの移行も、飛躍というよりは、管理された段階的なプロセスとして感じられるようになります。
まとめ
Typhoon HILを活用することで、リスクの高い高出力プロトタイプ試験に着手する前に、リアルタイムのプラントモデルを用いた閉ループ環境でハイブリッドインバータコントローラの開発および検証を行うことが可能となりました。このアプローチにより、現実的(かつ再現性のある)条件下での系統同期挙動、パワーステージ間の相互作用、および保護ロジックの早期検証が可能になったほか、安全な故障試験の実施も可能となりました。
– Jabil Renewables 設計エンジニアリングチーム
ここに記載された見解や意見は、Jabil独自のものであり、Typhoon HILHIL506に関する当社の経験に基づいています。ただし、Typhoon HILabilTyphoon HIL, Inc.社から、同社のHIL506を推奨することに対する報酬を受けています。