
はじめに | Typhoon HIL の起源
HTWザールでのユリアン・リーデルの修士論文の一環として、Typhoon HIL CarMaker間のコシミュレーションが開発されました。この取り組みにおいて、Typhoon HIL リアルタイムシミュレータ「Typhoon HIL 」をCAN通信を介してIPG CarMakerに接続し、電気自動車の四輪駆動シミュレーションモデルが作成されました。 このシミュレーションモデルは、ラヴェンズブルク・ヴァインガルテン大学(RWU)での別の修士論文においてさらに発展させられました。詳細なバッテリーモデルとバッテリー管理システム(BMS)が、HIL上のドライブトレインモデルに統合されました。さらに、システムに障害を導入するための様々な手法が組み込まれ、障害注入試験(FIT)が実施されました。 IPG CarMakerとTyphoon HIL コシミュレーションTyphoon HIL Typhoon HIL 上でシミュレーションされた電気部品のリアルタイム応答を観察しTyphoon HIL 走行中の車両の動的応答を分析することがTyphoon HIL 。さらに、車両ダイナミクス、走行ルート、および環境要因の検証が可能となり、ドライブトレインの故障が車両挙動に及ぼす影響を正確に分析することができます。
ソリューション | 協調シミュレーションの設定
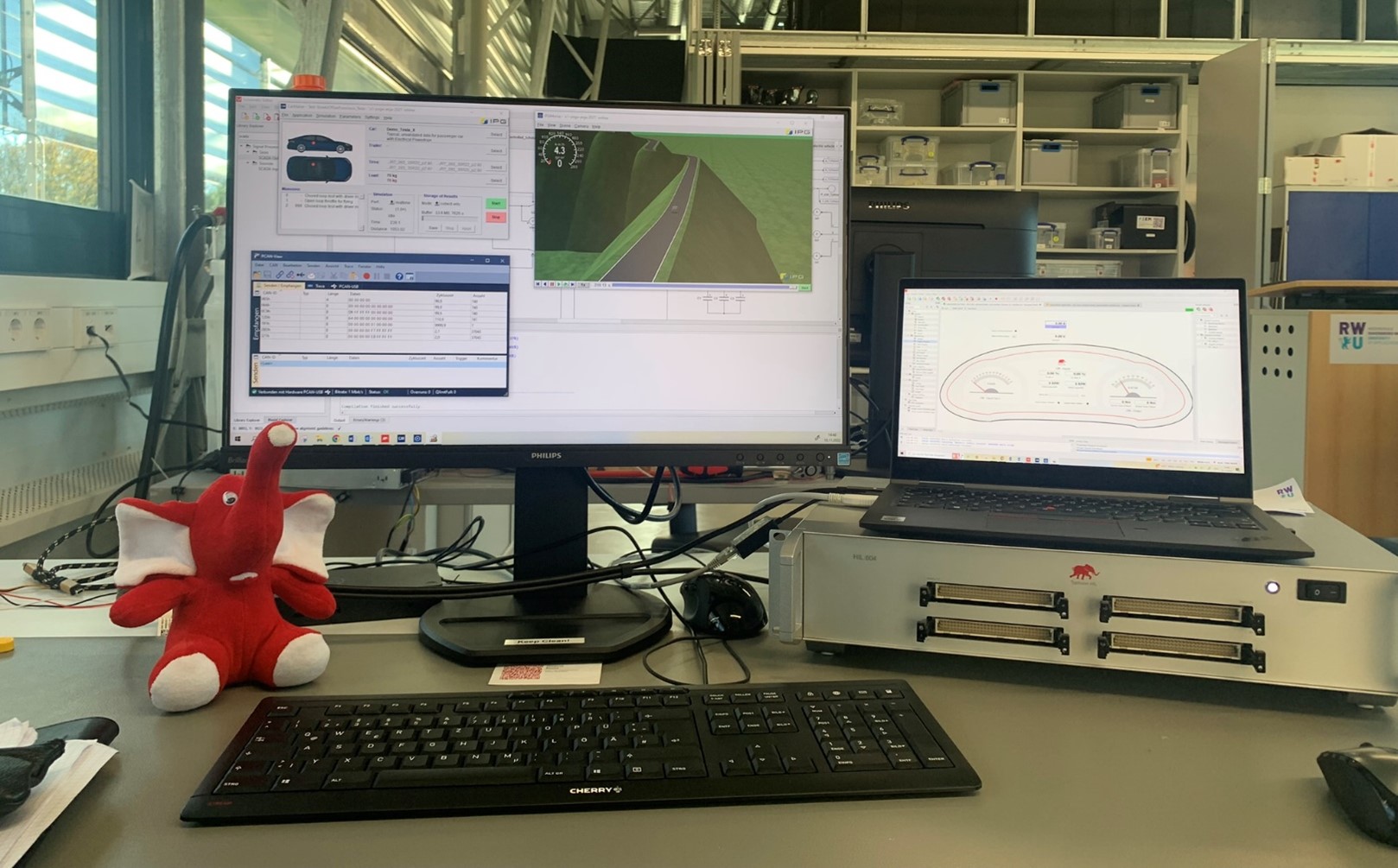
コシミュレーションを実装するには、HIL604ハードウェアデバイスおよび付属の Typhoon HIL Control Center ツールチェーンに加え、IPG Automotive社のCarMakerソフトウェアがホストコンピュータ上で稼働しています。これら2つのコンポーネント間の通信はCANを介して行われます。この構成を図1に示します。
この車両モデルは、各車軸に1基ずつ計2基の非同期モーターを搭載した四輪駆動のバッテリー式電気自動車(BEV)を表しています。モデル車両は、テスラ「モデルX 100D」をベースとしています。 電気モーター、インバーター、コントローラー、バッテリー、バッテリー管理システム(BMS)などのすべての駆動系コンポーネントは、Typhoon HIL シミュレーションされます。道路、シャシー、ドライバー、それに伴う走行抵抗、および車両ダイナミクスは、CarMakerシミュレーション環境でシミュレーションされます。これらのシミュレーションモデルを組み合わせることで、システムレベルでの包括的な車両シミュレーションが実現され、テストに新たな可能性をもたらします。
図2は、Typhoon HIL 上でシミュレーションされた駆動系モデルの概要を示しています。このモデルは、HTWザール大学での初期の修士論文で開発された電気自動車のサンプルモデルを基にしており、ラーヴェンスブルク・ヴァインガルテン大学において、詳細なバッテリーおよびバッテリー管理システム(BMS)モデルが追加されています。 3相インバータおよび非同期モーターは、Typhoon HIL 取得したモデルである。図2に示されたコンポーネントに加え、フィールドオリエンテッド制御、CANトランシーバおよびレシーバも、HILデバイス上に実装されている。
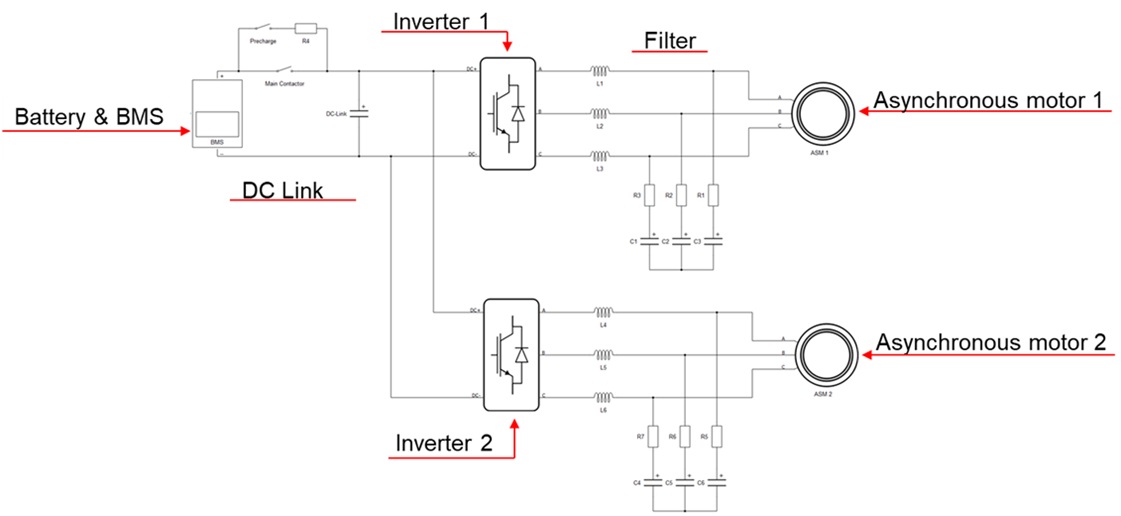
このバッテリーモデルは、Typhoon HIL モデルを採用した、容量103.55 kWhの400Vリチウムイオンバッテリーを表しています。バッテリーは2つのストリングで構成されており、各ストリングは3つのバッテリーモジュールから成ります。各モジュールは、32個のセルを直列に、9個のセルを並列に接続した構成となっています。 さらに、個々のセルを変更する機能が2つのモジュールに組み込まれています。この機能は、後からバッテリーに故障を発生させ、CarMaker上でバッテリー管理システム(BMS)および車両の応答をテストできるようにするために組み込まれています。
バッテリー管理システム(BMS)はバッテリーを監視・制御し、各セルの電流、電圧、温度を常時監視します。これにより、過放電、過充電、過熱、短絡からの保護が確保されます。さらに、BMSは車両始動時に制御を引き継ぎ、DCリンクコンデンサを事前充電した後、メインコンタクタを閉じて動作します。
前述の通り、車両ダイナミクス、走行ルート、およびドライバーはIPG CarMakerでシミュレーションされます。CarMakerは、実車両とその環境の物理シミュレーションを含む仮想走行シナリオの表現を可能にするシミュレーションソフトウェアです。さらに、様々な状況における車両の動的挙動を評価するための仮想走行テストの実行を可能にします。IPG Movie機能により、道路上での車両の挙動を可視化できます。 図3は、IPG Movie上で合成道路を走行中の試験車両を示している。

共同シミュレーションを実施するため、CarMakerでは2つの電動機を備えた電動パワートレインを利用し、対応する代替モデルを作成した。電動パワートレインはハードウェア・イン・ザ・ループ(HIL)システム上でシミュレートされるため、この代替モデルにはリアルタイムシミュレータとの通信機能が含まれ、現在のモーター速度と負荷要求をHILへ送信する。 各モーターのトルクはHIL上で計算され、CAN経由でCarMakerに返送される。さらにCarMakerでは、車両ボディに関連する全データ(正面面積、車両重量、空気抵抗係数、タイヤタイプなど)を定義する。
この共同シミュレーションは、両システムの利点を融合したものです。Typhoon HIL 上のドライブトレイン・モデルにより、電気部品の忠実度の高いリアルタイムシミュレーションTyphoon HIL 。CarMakerは、ドライバー、環境、および車両ダイナミクスを精密にシミュレーションし、その結果をIPG Movie NXで表示します。
ラーベンスブルク=ヴァインガルテン大学における本論文の文脈において、協調シミュレーションを用いた故障注入試験とその利点が実施された。道路車両の安全関連電気電子システムに関するISO 26262によれば、重大なエラーに対するシステムの応答を理解し評価することが極めて重要である。したがって、システムが故障にどう反応するかを評価するため、意図的に3種類の異なる故障を車両モデルに導入した。 駆動系の電気部品の応答と、様々な走行条件下における車両の動的応答を試験・分析した。HIL SCADAを使用することで、埋め込まれた故障をワンクリックで有効化・無効化および監視できる。例えば、バッテリーのセル温度を変更し、この温度変化に対するバッテリー管理システム(BMS)の応答を試験することが可能である。詳細な故障シナリオと分析は、参考文献に記載されている。
このように、Typhoon HIL CarMakerTyphoon HIL 共同シミュレーションをフォールトインジェクションテストと組み合わせることで、ISO 26262に準拠した機能安全の確保に寄与することが実証された。この手法は、電動パワートレインの評価と最適化に新たな可能性をもたらすだけでなく、様々なテスト構成やエッジケースのリアルタイムなテスト、評価、可視化を可能にし、車両の開発および検証において新たな機会を創出する。
参考文献
- リーデル, J., 「バッテリー電気自動車モデルのリアルタイム対応SiL共同シミュレーションの構築と実装」修士論文 HTWザール, 2022年.
- Konzept, A., 「BEV故障注入試験のためのHILベースのリアルタイム共同シミュレーション」, SAE技術論文 2023-24-0181, 2023, https://doi.org/10.4271/2023-24-0181
クレジット
著者 | アンヤ・コンセプト
ビジュアル | アンヤ・コンセプト、カール・ミッケイ
編集者 | デボラ・サント


