はじめに
現代の電力系統(新興のマイクログリッドや先進的な船舶用電力システムを含む)は、ますます通信・制御ネットワークが重要となっている。これらのネットワークを通じて、太陽光インバーター、風力タービンインバーター、蓄電池システム、マイクログリッド制御システムなど、無数のスマート電力電子デバイスやシステムが相互に通信を行う。
さらに複雑さを増すことに、これらのスマートデバイスはすべて、Modbus、IEC 61850、DNP3など、数多くの異なる通信プロトコル(言語)を話す。したがって、現代のインテリジェント電子デバイス(IED)に対する徹底的なコントローラ・ハードウェア・イン・ザ・ループ(HIL)テストには 、高度に統合された通信ツールボックスが必須である。
通信プロトコルの完全なサポートが最先端のHILテストにおいて必須となっている3つの主な理由について、以下で詳しく説明します。
1.テスト保護システムの設定

保護装置を効果的に試験するには、IEC 61850変電所構成言語(SCL)を完全にサポートする通信ツールボックスが必要です。 このツールボックスは、物理ハードウェアをシミュレーションに接続するのではなく、設定ファイル(例:.ICD、.SSD、.SCDファイル)を通じてリアルタイムシミュレータでモデル化された無制限の保護装置を組み込むことを可能にするため、保護試験を全く新しいレベルに引き上げます。
その利点は画期的であり、インバータやその他の分散型エネルギー資源(DER)を含むシステムの1マイクロ秒時間ステップによるリアルタイムHILシミュレーション、保護設定の自動テスト、保護装置要件の実行可能仕様など、さらに多くの機能が含まれます。
2. 全体的にテストする

現代のスマートグリッド接続デバイスは、相互に通信し、例えば配電管理システム(DMS)と監視制御・データ収集(SCADA)システムを介して通信することが求められている。そのため、通信プロトコルはHILテストにおいてますます重要になっている。
通信プロトコルをHILリアルタイムシミュレーションに統合することで、被試験デバイス(DUT)が他のグリッド接続デバイス(実機またはエミュレートされたデバイスを問わず)と相互作用する際に、現実的なテストが可能となる。
言い換えれば、HILと通信プロトコルの組み合わせこそが、DUTが自律的に動作する場合も、より大規模なデバイスネットワークの一部として動作する場合も、期待通りに機能することを保証する包括的なテストの成功の秘訣である。
3.複数プロトコルによるテスト
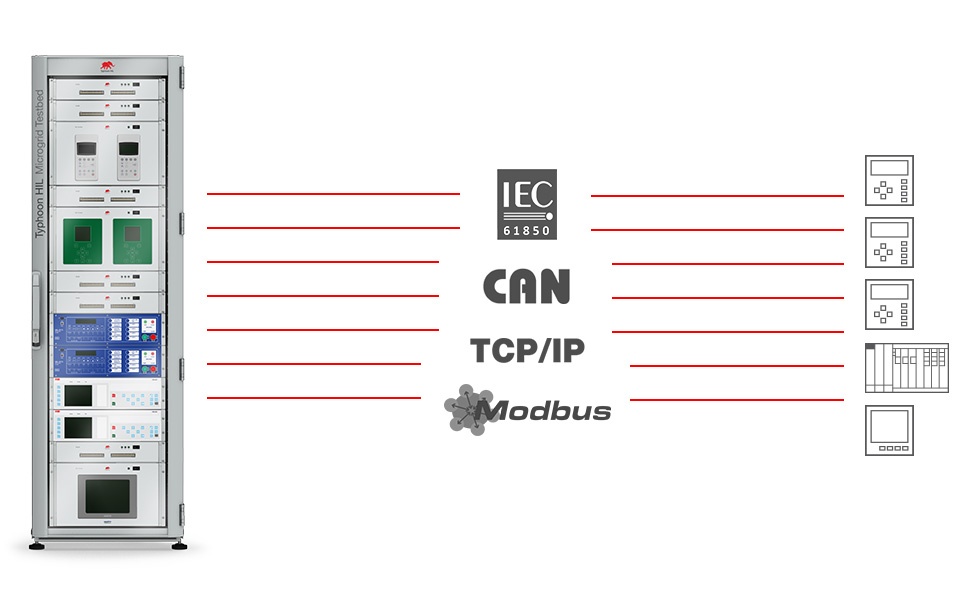
マイクログリッドシステムの例を考えてみよう。SCADAはMODBUS/TCPを、リレーはIEC 61850を、電気自動車(EV)のエンジン制御ユニット(ECU)はCANを、マイクログリッド 制御システムはDNP3をそれぞれ使用する …従来のテストでは、 これらすべてを同一のシミュレーションに統合することは非常に困難である。
まさにこの理由から、必須となるのは、汎用的な通信ツールとして設計され、完全に設定可能であり、かつ標準的なドラッグ&ドロップSchematic Editor と統合された通信ツールボックスである。あらゆる動作条件下で通信が期待通りに機能することを保証する手段が必要となる。
テスト対象のインバータ制御装置がスレーブモードでMODBUSを介してマイクログリッド制御装置と通信すると同時に、2つの独立したIEC 61850チャネルを用いて2つの保護リレーと通信する状況を想像してみてください。同様に、EVのバッテリー貯蔵制御装置は、CANを用いてEVの他の部分と通信し、メーカー独自のTCP/IPベースのプロトコルを用いて充電ステーションと通信することがあります。
しかしそれだけではない。真に有用であるためには、Python APIを備え、テストシナリオの要求に応じてテスト実行の自動化や異なるプロトコル間のメッセージ変換を容易にプログラミングできるコミュニケーションツールボックスが必要だ。言い換えれば、スマートグリッド通信言語のバベルフィッシュとなることである。
クレジット
著者 | アレクサンダル・カヴギッチ
ビジュアル | Typhoon HIL
編集 | デボラ・サント