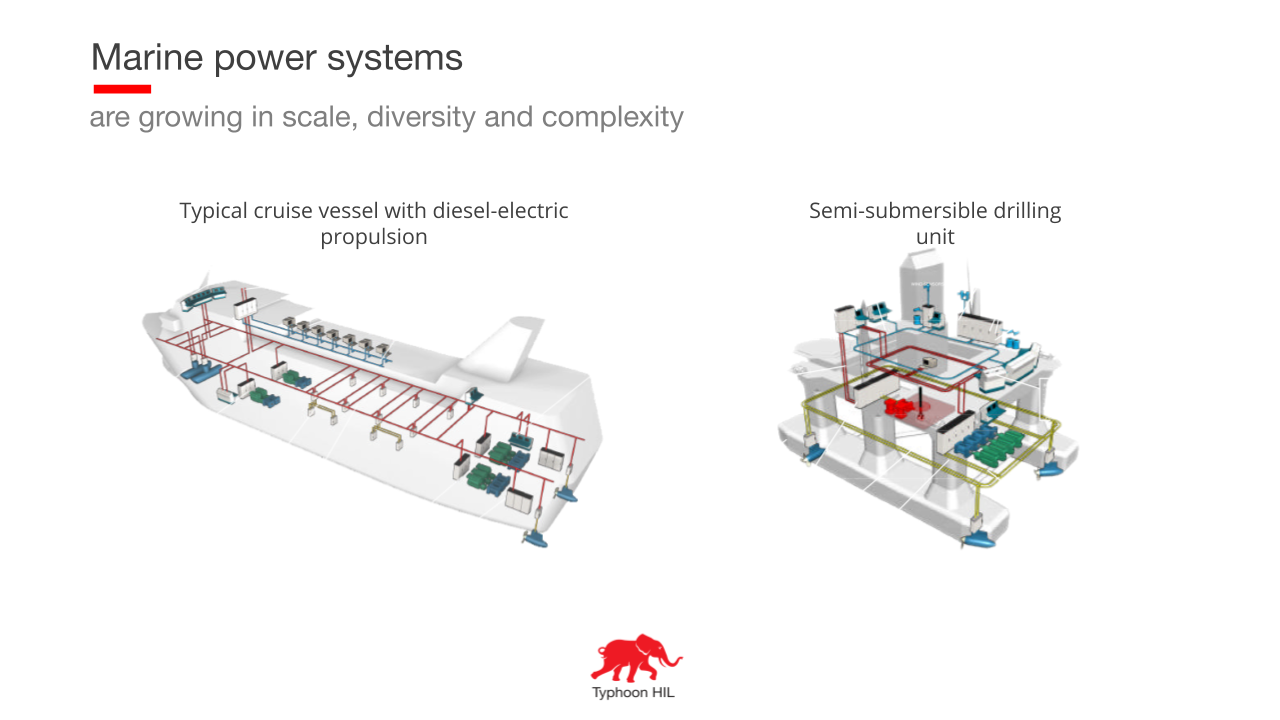
はじめに | デジタル化と電化が融合してマイクログリッドが生まれる
ASNEの「インテリジェントシップ」や「海軍連盟のシー・エア・スペース・エキスポ」といった展示会に行くと、「デジタル」という言葉を頻繁に耳にする。コンピューティング要件、サイバーセキュリティ対策、モデルベース診断、無人車両の自律制御などが、今や大流行だ。
船舶がデジタル化や推進に必要なコンピューター、センサー、熱制御、電磁カタパルト、指向性エネルギー兵器の運用において、ますます電力に依存していることも明らかである。
この二つの概念——デジタル化と電化——は別々に考えるべきではない。高品質の電力なしではコンピュータを稼働させられない。フェーズドアレイレーダーによるスキャンも、膨大な電力を短時間・不規則なタイミングで供給しなければ不可能である。
効率性と規模の要件に制約されています。そしていずれかの時点で、電力需要が発電能力を上回ることになるでしょう。
時間の経過とともに機器の劣化も生じます。
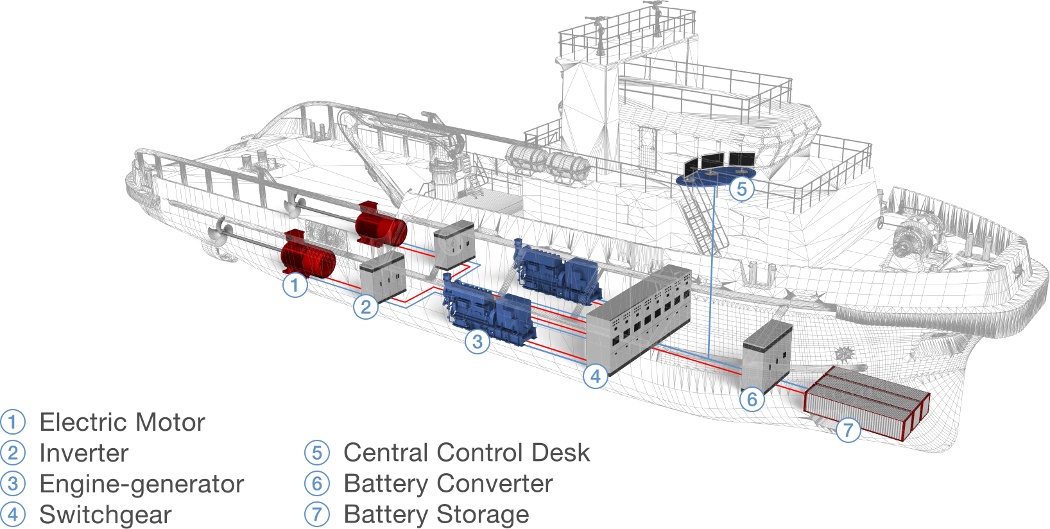
では、デジタル化と電化という二つの考え方を組み合わせるのはどうだろうか?分散型エネルギー資源(発電機と蓄電装置)が負荷に接続され、システムがコンピューターで制御される時、マイクログリッドが実現する。船舶はマイクログリッドである。
マイクログリッドの設計と構築がなぜそれほど難しいのか?
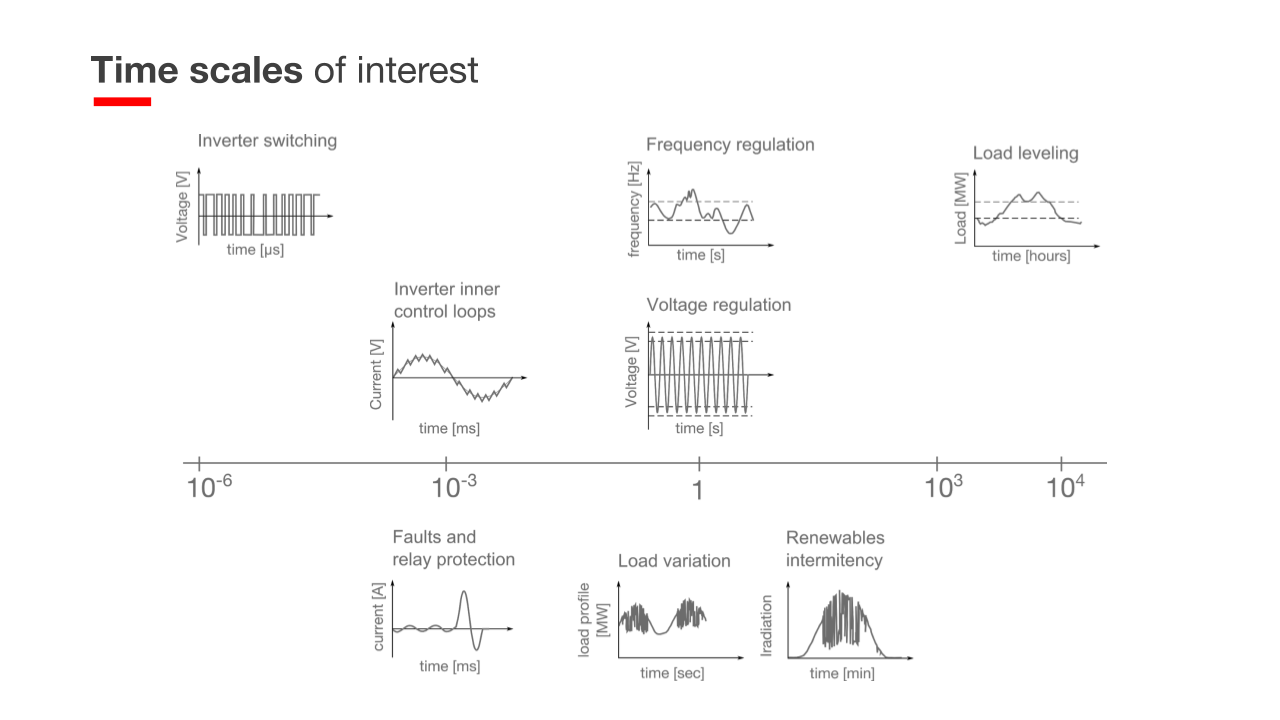
二つの理由:速度と量――どちらも電力のデジタル制御に関連している。
チャレンジ1 | まずはスピードから始めましょう。
現代において船舶の設計・建造を担当する技術者が、3D CAD/CAMを用いずに作業を行うことは考えられない。水陸両用艦は配管から通路に至るまで、コンピュータを用いて詳細にモデル化される。その後、機械モデルは分割され、ある造船所が船尾部を建造する一方で、別の造船所が船首部を建造できるようにする。
鋼材を切断・敷設する前に、技術者はモデル上でシミュレーションを実行し、仕様が満たされていることを確認する。
設計者は、6フィートのモデル「被験体」を船内のあらゆる通路に「歩かせる」ことができる。訓練中にデジタル海兵隊員が頭上構造物に頭をぶつけたり、乗組員全体を模擬した訓練中に他のモデルと衝突したりすると、ソフトウェアが自動的に記録する。
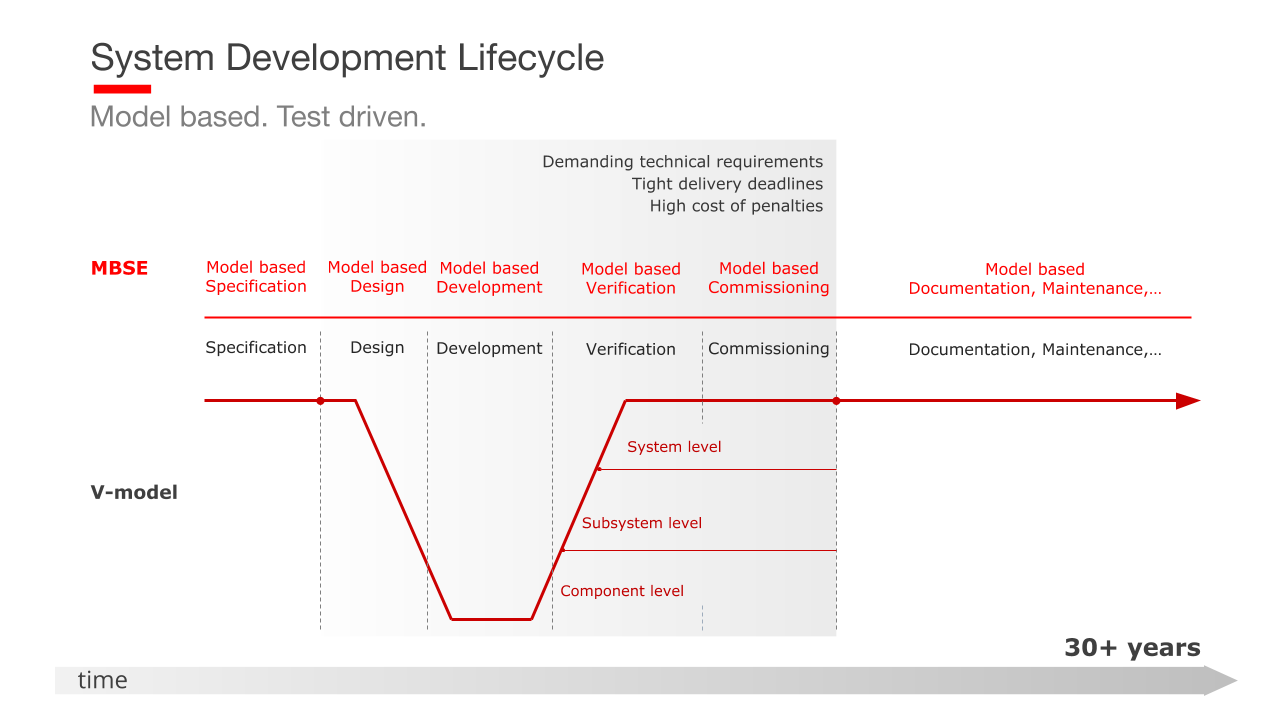
このモデルベースエンジニアリング(MBE)アプローチにより、建設前に設計変更を必要とする問題を早期に検出することで、数百万ドルのコスト削減が実現します。 しかし、試験やシミュレーションにおいて、電気信号や制御信号を表現するために身長180cmの「被験者」が必要となる場合はどうだろうか?ミリ秒単位の精度を要求される場合、その「被験者」を完全に見逃すか、運良く見えたとしても、彼が頭を900回打つ前か、それとも153回打った後か、確実に判断できないだろう。
電子的な「被験体」が電子的な「頭上」構造物(例えば静的自動バス転送装置(SABT))に「頭をぶつける」瞬間や、発電と負荷間の相互作用を捉えるには、電気の速度で発生する相互作用――本質的にはマイクロ秒単位の瞬間に――を観察できる必要がある。それは速い!
そのスピードがなければ、実物大のプロトタイプを製作しなければなりません。それで機能する保証はありませんが、莫大な費用がかかることは確実です。
課題2 | 次は音量の問題だ。
船舶搭載のリレーについて考えてみよう。かつて手動スイッチだったものが、今ではコンピュータ化されている。装置自体にコントローラーが内蔵され、それが遠隔ステーションや複数のシステムコントローラーによって制御される。船舶搭載の装置にコンピュータ制御装置が組み込まれるほど、いわゆるモノのインターネット(IoT)が想起され、船舶はデジタル化される。
では、これらの「スマート」デバイスそれぞれにおけるコード行数を考えてみましょう。
数千、いや数十万行が標準だ。これを数千台のデバイスに掛け合わせ、さらに異なるベンダーやソフトウェアエンジニアが加わる。
この膨大な量のコードと、すべてのコントローラ間の相互作用をどのように管理しているのですか?「スマート」コントローラのファームウェア更新について考えてみましょう。単一の更新がシステム全体を損傷しないことを、どうやって確認するのですか?
ソリューション | なぜMBEにコントローラ・ハードウェア・イン・ザ・ループ(C-HIL)が必要なのか?

コントローラやファームウェアの更新を検証・妥当性確認するため、C-HILプラットフォームを活用することで、マイクログリッドコントローラの性能を保証するための広範なテストが可能になります。Typhoon超高忠実度C-HILシステムは、システムインテグレーターを支援するハードウェア、ソフトウェア、およびエンジニアリングサービスからなるパッケージです。
当社のMBEアプローチは、現代のマイクログリッドを構成する電力システムと制御システムの複雑な相互作用に焦点を当てています。
この電力電子および制御分野で要求されるリアルタイム(サブマイクロ秒)精度を達成するため、実際のデジタル制御器をデジタルモデルと統合したコントローラ・ハードウェア・イン・ザ・ループ(C-HIL)テストベッドを構築する。
メリット | C-HILで船舶ライフサイクルのメンテナンスを強化
「Typhoon C-HIL テストベッド」は、プロジェクトのライフサイクル全体を通じて、コンセプトを洗練させるためのツールとして活用できます。このリアルタイムシミュレーションプラットフォームは、極めて忠実度の高いマイクログリッドのデジタルツインを提供し、これにより船舶用電力システムの設計者は以下のことが可能になります:
- スマートデバイスおよびマイクログリッドコントローラーへのファームウェアおよびソフトウェアのアップグレードを、導入前にシームレスにテストする;
- 運用中に予期される、または発見される可能性のある異常をモデル化しシミュレートし、修正策をテストする。
- テスト機器のアップグレードおよび導入前に発生する可能性のある相互運用性の問題;
このアプローチはリスクを低減し、時間と費用を節約するとともに、プロジェクトの全ライフサイクルにわたって業務効率と回復力を向上させます。
クレジット
著者 | マット・ベイカー
ビジュアル | カール・ミッケイ
編集者 | デボラ・サント


