はじめに| マイクログリッド&分散型エネルギー資源(DER)コントローラーシンポジウム
マイクログリッド&分散型エネルギー資源(DER)コントローラーシンポジウム2017において、MITリンカーン研究所のエリック・リンペーチャーの発案による超高精度コントローラー・ハードウェア・イン・ザ・ループ(HIL)が注目を集め、その輝きを放っていた。それは出席した全ての電力技術者の心をつかんだ。
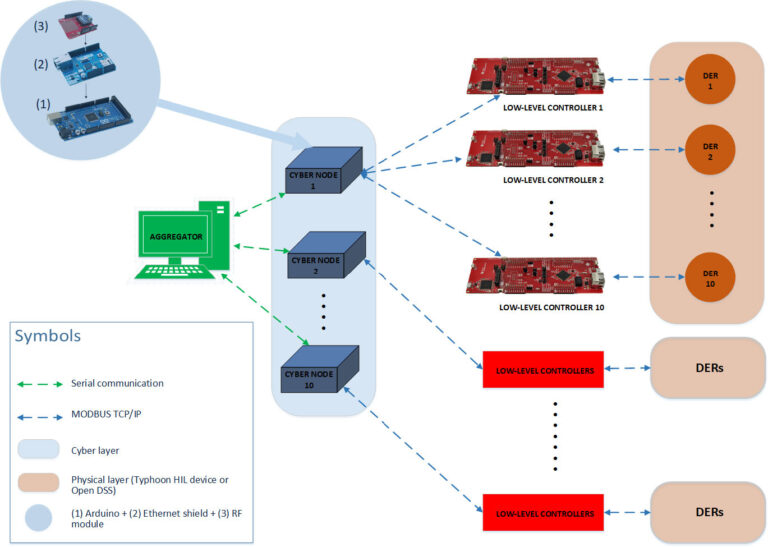
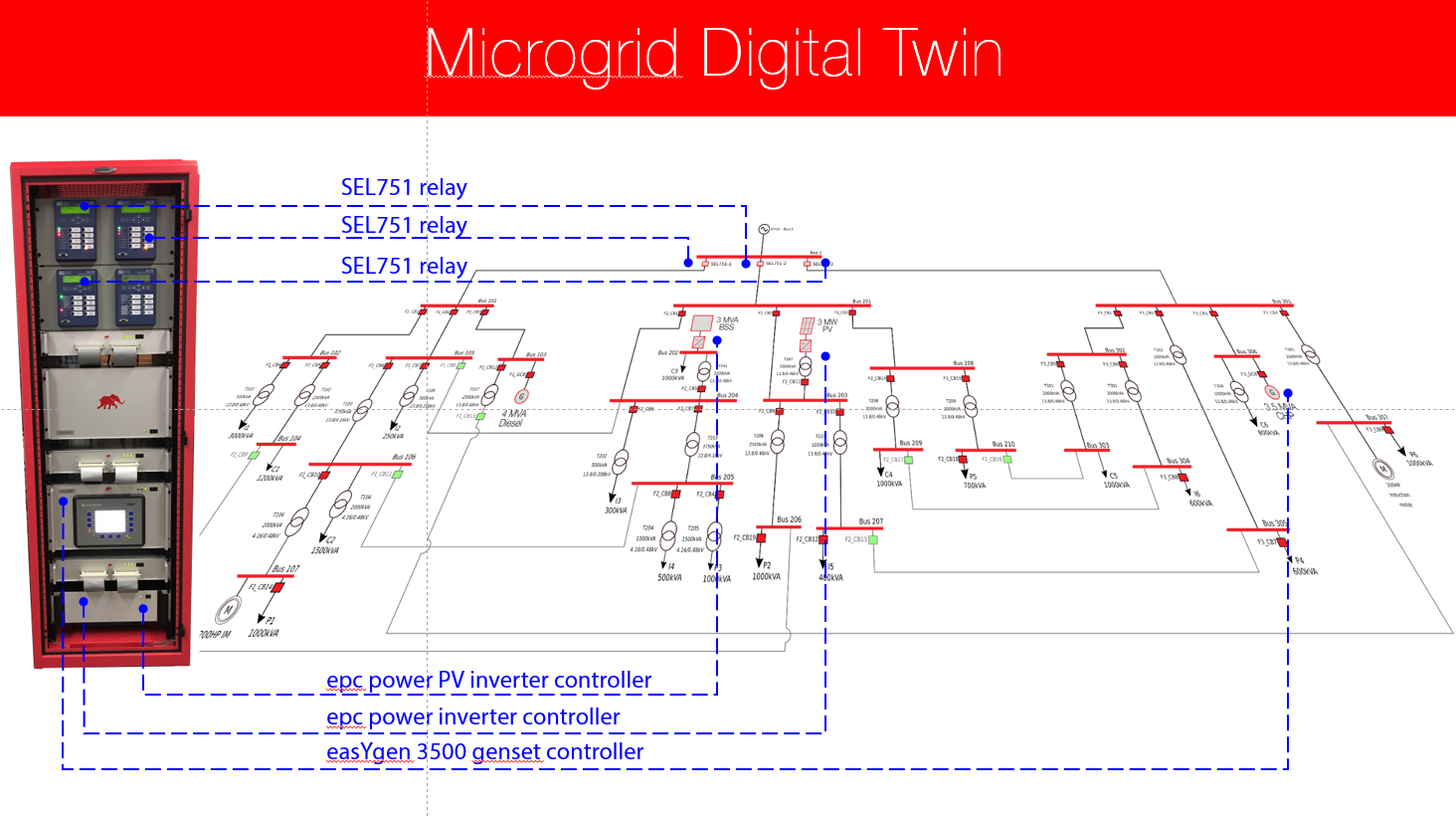
ワークショップのメインステージでは、イートン、GE、SEL、シュナイダーといったメーカーの、本物で純粋な産業用マイクログリッド制御装置が稼働していた。これらはマイクログリッド制御装置-HILテストベッドと直接接続され、制御を行っていた。テストベッドはリアルタイムシミュレーションを実行し、3つのフィーダーと24のバス、ディーゼル発電機1基、熱電併給式天然ガス発電機1基、蓄電池、PVインバーター、そして多数の負荷で構成されていた。
マイクログリッド制御装置は、様々な障害を含む広範な外乱に対処する必要があった。これには、放射量プロファイル、負荷プロファイル、および配電管理システム(DMS)からマイクログリッド制御装置への要求(例:有効電力/無効電力の輸出、孤立運転など)が含まれる。
マイクログリッド制御装置ベンダーと共同作業を行い、シンポジウムのデモ準備を進める中で、今後の設計・テスト・検証・統合における課題解決に役立つ6つの重要な教訓を得ました:
- 汝はHILを用いるべし。
- シンプルに始めよう。
- HILモデルとの通信を設定し、テストする。
- 実際のコントローラーをループに組み込んでテストし、信頼性を構築する。
- 容赦なくテストせよ。
- マイクログリッド制御装置のサイバーセキュリティをテストする。
1.HILを使用せよ
マイクログリッド制御装置の設計とテストは、そもそも困難を極める。適切なツールなしでの設計とテストは、ほぼ不可能に近い。今日、HILプラットフォームを持たないベンダーにおけるマイクログリッド制御装置の設計・テスト・試運転は、次のような状況にある:
- オフラインシミュレータ(多くの場合、定常状態電力フロー計算)を用いて電力系統をシミュレートし、保護設定値を取得する(限定的な定常状態解析に基づく)。
- オフラインシミュレーションの結果を起点として、マイクログリッド制御装置のプログラミングと設定を行う。
- 現場に行き、マイクログリッド制御装置を動作させてみてください。
- 現場での試運転中に、マイクログリッド制御装置と分散型エネルギー資源(DER)間の通信に関する問題に対処する。
- 基本コントローラの機能性と保護機能をテストし、マイクログリッドを稼働させる。
- マイクログリッドがダウンしたとの連絡が、あまり早く来ないことを願う。
HILマイクログリッド試験装置のコントローラ設計とテストでは、そのプロセスは全く異なるものとなります:
- マイクログリッドの電力ステージモデルを構築する。仮想HILまたはオフラインシミュレータを使用し、主要なマイクログリッドパラメータを取得する。
- 個々の分散型エネルギー資源(DER)に対して、ユニットテスト用HILモデルを使用してマイクログリッド制御装置の通信を設定およびテストします。DERは1台ずつ処理します。(その間、オフィスで快適に暖を取りながら作業できます。)
- マイクログリッドのリアルタイムHILモデルを用いて、完全なマイクログリッドコントローラをテストする(実際のコントローラをループに含めない – コントローラを含むマイクログリッド全体がシミュレートされるため)。
- ループ内にコントローラを一つずつ追加し、テストを継続する。基本コントローラの機能性と保護機能から始まり、複雑なモード切替などまでテストする。
- 気軽にマイクログリッド現場へ赴き、コントローラーファームウェアを現場コントローラーにダウンロードし、自信を持ってマイクログリッドコントローラーの試運転を完了させる。

2.シンプルに始める
マイクログリッドは複雑なシステムである。一方で、マイクログリッド制御装置と分散型エネルギー資源(DER)およびリレー間の通信は複雑(複数の通信プロトコル)で標準化が不十分であり、他方で発電機と負荷の動的挙動が複雑なシステム挙動を引き起こす。
したがって、制御システムの設計およびテストにおいては、単一のDERモデル(例:蓄電池、発電機セットなど)から着手し、まず通信機能の検証、計測値の較正、設定値の参照値テスト、状態切り替えテストを実施すべきである。その後、同じシンプルなビルドレベル0ユニットテストを用いて動的挙動の検証に移行する。
3.HILモデルとの通信設定およびテスト
マイクログリッド構成要素向けの検証済み超高精度モデル、特に分散型エネルギー資源(DER)とリレーの動的モデルは極めて重要である。超高精度シミュレーションモデルには二面性がある:
- コミュニケーションモデルの忠実度、および
- 動的モデルの忠実度。
4.実際の制御器をループに組み込んでテストし、信頼性を構築する
すべてのユニットテストが完了し、通信プロトコルが稼働し完全に検証された時点で、ビルドレベル1(BL1)モデルに移行する段階となる。
ビルドレベル1とは、シミュレーションに実際の制御装置をループ内に組み込んでいる状態を指します。例えば:実際のリレー、実際のインバータ制御装置、実際の発電機制御装置などをループ内に配置できます。
5.執拗にテストする
ビルドレベル0およびビルドレベル1モデルでマイクログリッドコントローラーを構築・テストした後、包括的なシステムレベルテストに着手する準備が整います。
この段階では、故障シナリオ、様々なシステム障害、および多様な負荷と放射照度プロファイルを含む自動化されたテストシーケンスのライブラリ構築を開始します。
6.マイクログリッド制御装置のサイバーセキュリティをテストする
試運転前の最終段階は、マイクログリッド制御装置と通信サイバーセキュリティの試験である。制御装置のハードウェア・イン・ザ・ループ(HIL)は、サイバーセキュリティとセキュリティ侵害の潜在的影響を試験・検証する理想的なテスト環境である。
実際、全てのコントローラがループ内にあるため、通信および制御アーキテクチャは最終的なハードウェア設置環境と同一である。したがって、コントローラHILはサイバーセキュリティのテストと検証に最適なサンドボックスを提供する。
結論 |興味深い時代に生きられますように
文明として、私たちは電気エネルギーの生産・流通・利用方法を根本的に再構築する大規模な変革の始まりに過ぎない。実際、分散型エネルギー資源の統合、再生可能エネルギー発電の導入、高度な分散制御と協調システムを通じて、エネルギーネットワークをより強靭で柔軟かつ持続可能なシステムへと変革する過程にある。
これらの目標を達成する唯一の方法は、超高忠実度ハードウェア・イン・ザ・ループ(HIL)リアルタイムシミュレーションを含む、新たな電子設計自動化(EDA)ツールの迅速な導入によってのみ実現される。
クレジット
著者 | イヴァン・チェラノヴィッチ
ビジュアル | Typhoon HIL
編集 | デボラ・サント