はじめに | パワートレイン制御ソフトウェア開発
電気自動車(EV)パワートレイン制御装置の制御ソフトウェア開発は複雑な作業であり、絶え間ない修正とテストを必要とする。まず要件を分析し、機能性と性能を定義する。次に制御システムアーキテクチャを設計し、各パワートレインコンポーネントとの相互作用仕様を伴う。 最終的に、制御ソフトウェアはコントローラの安全な動作を保証するため厳格なテストを受ける。しかし、開発プロセスの終了までテストを開始せずに待つと、開発の早い段階で検出されるべき不具合が発見された場合、コスト増加やスケジュール遅延を招く可能性がある。モデルベース設計(MDB)アプローチを採用することで、EVパワートレイン制御ソフトウェア開発におけるこうした課題を克服できる。
モデルベース設計| その利点とは?
電気自動車のパワートレインのような複雑なシステムを開発するには、最高品質とゼロバグを実現する効率的な設計手法が不可欠である。MBD(モデルベース開発)アプローチを採用することで効率性が向上し、開発期間が短縮される。MBDでは数学モデルを用いて電気パワートレインをシミュレートし、開発段階において制御装置の応答を検証するため、実際の制御システムの信頼性の高いテストが可能となる。さらに、開発チームは最新のモデルバージョンを用いて並行して協業できる。
MBDアプローチは設計段階における継続的な基本テストを促進し、早期のエラー検出と修正を可能にします。その結果、このアプローチは大規模なデバッグ作業を最小限に抑え、大幅な時間とリソースの節約につながります。それでもなお、制御ソフトウェア開発では通常、追加の課題が生じます。例えば、異なるハードウェアプラットフォーム間での互換性の確保や、全てのコントローラパラメータを包括的にアクセスすることでシステム性能を最適化することなどが挙げられます。
制御設計と検証| 制御ソフトウェア開発の段階
MBDアプローチを用いたEVパワートレイン制御ソフトウェアの開発には、いくつかの段階が伴います。最初のステップは、要求事項を収集し、Model-in-the-Loop(MIL)手法を用いたシミュレーションソフトウェアで制御ロジックをテストすることです。制御ロジックが検証された後、次のステップはSoftware-in-the-Loop(SIL)手法を用いてソフトウェア設計を検証することです。 この段階で、ラピッド・コントロール・プロトタイピング(RCP)手法の適用が始まります。これは、デジタルプラントモデルに接続された開発用コンピュータ上でコントローラモデルをシミュレートするものです。実際のコントローラハードウェアをテストする複雑さを伴わずに、開発中のコントローラのコンセプトをテストする費用対効果の高い方法です。
制御ソフトウェアの検証後、制御戦略を効果的に実行するため、コントローラコードは入出力インターフェースを備えたリアルタイムハードウェアに転送される。この段階では、特定の用途向けに最適化された最終ハードウェアが利用できない可能性があるため、汎用制御ハードウェアが使用される場合がある。コントローラコードの展開後、ハードウェアの応答と動作を検証するため、コントローラをオープンループ動作と入力信号に曝す簡易テストが実行される。
コントローラがハードウェア上で順調に動作したら、プラントに対するテストの段階に移ります。ハードウェア・イン・ザ・ループ(HIL)は制御対象のプラントをエミュレートするため、コントローラのプロトタイピング中に物理的な発電所を用意する必要がありません。 最終段階では、制御コードをコスト最適化されたハードウェアコントローラ上で実行しつつ、システムはHILによるエミュレーションを継続します。これら二段階のプロセスにより、実プラントはHIL上でリアルタイム動作する適切な計算モデルに置き換えられ、テスト対象デバイス(DUT)や他の機器と入出力インターフェースを確立します。
テストの制約や後期段階でのデバッグはプロジェクトコストを増加させるため、開発が進むにつれて問題の特定と修正はますます高コスト化する。開発プロセス全体を通じて厳密かつ包括的なテストを実施することで、開発者は潜在的な問題を迅速に特定・解決でき、後工程での高コストなデバッグ作業を最小限に抑えられる。このアプローチによりリソース活用が最適化され、EVパワートレインコントローラ向け高品質制御ソフトウェアの確実な提供が保証される。
業界の視点| 市場で入手可能な最先端技術
最適な製品開発を行うためには、優れたハードウェアとそれを支えるソリューションが不可欠です。インフィニオン、ベクター、Typhoon HIL 、設計期間とコストを削減し、ソリューションの品質と信頼性を最高水準に維持するための、最先端かつ高度な開発ツTyphoon HIL 。
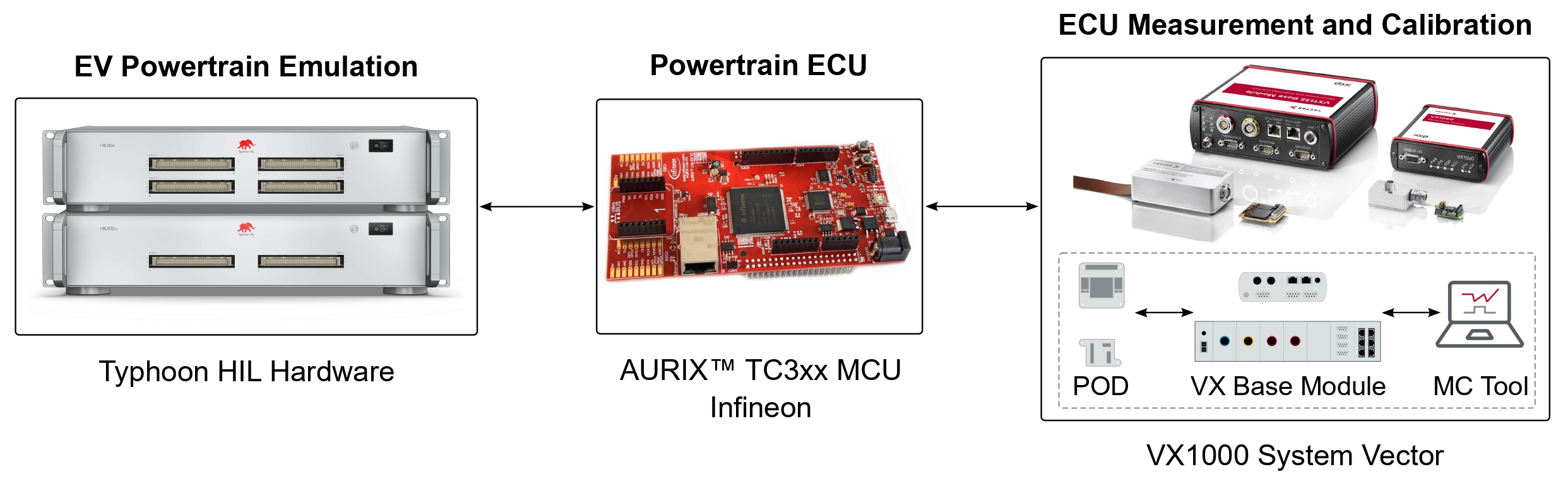
インフィニオン AURIX™ TC3xx 自動車用マイコン
インフィニオンはMCU向けチップ供給における市場リーダーです。その一例がAURIX™-TC3xxマイクロコントローラ・ファミリーです。最大ヘキサコアの高性能アーキテクチャ、高度な接続性、安全性、機能保護機能を提供し、様々な自動車用途に最適です。AURIX™-TC3xxファミリーのコンセプトは、ASIL-D要件を満たしつつ最適な柔軟性を実現するため、スケーラブルな機能セットとピン配置も提供します。
32ビットTriCore™プロセッサアーキテクチャをベースとするAURIX™-TC3xxは、リアルタイム性能と電力効率のバランスを実現し、シングルコアからマルチコアまで幅広い性能オプションを提供することで、スケーラビリティと設計の柔軟性を可能にします。 これらのMCUは、ハイブリッド制御ユニット、HEVおよびBEVにおけるインバータ制御、バッテリー管理、DC-DC充電器およびコンバータ、モーター管理システムなど、電気およびハイブリッド駆動システムのEVアプリケーションに適しています。
ベクターのVX1000システム
ベクターのVX1000システムは、ECU測定およびキャリブレーション作業向けにスケーラブルで高性能なソリューションを提供します。車両、テストベンチ、研究所においてシームレスに活用可能です。本システムは、高解像度レーダーセンサーで取得した生データとXCPデータを補完し、精密な制御を可能にします。
ECUと計測・キャリブレーションツール間のインターフェースとして、VX1000はECU内部データへの高速アクセスを可能にし、より高い伝送速度を実現します。自動車業界で広く採用されている標準規格であるXCP over Ethernetを介したPCとの接続性により、シームレスな統合が保証されます。
VX1000は数多くの利点を備えており、ECUデバッグインターフェース接続のためのコンパクトな装置サイズ、モジュールと装置の電気的絶縁、アダプターによる多様なECUコネクタの広範なサポート、ECUソフトウェアへの容易な統合などが挙げられます。これらの特性を総合的に備えることで、VX1000は自動車産業におけるECU測定およびキャリブレーションの厳しい要求事項を容易に満たす、包括的かつ効率的なソリューションとしての地位を確立しています。
Typhoon HIL 忠実度HIL
Typhoon HIL忠実度エミュレータTyphoon HIL、高度なハードウェアおよびソフトウェアを活用してシステムを正確にテストします。HILアプローチにより、物理的なプロトタイプを製作する前にコントローラのテストが可能となり、さまざまなテスト条件を設定したり、外乱や故障が発生した際の挙動を検証したりすることができます。
Typhoon HIL 、幅広いインターフェースおよび接続オプションを備えた超高精度モデルを通じて、複雑なシステムの電気的および動的特性を再現する、強力かつ柔軟なエミュレーションプラットフォームを提供します。さらに、Typhoon HIL垂直統合型ソフトウェアを活用することで、実システムの仮想モデルを作成でき、物理システムの挙動を正確に再現するデジタルツインの構築が可能になります。
デジタルツインを活用することで、エンジニアは故障、変動、過渡現象など、さまざまな条件下で設計を検証することができます。さらに、Typhoon HIL 自動テスト機能が含まれています。これにより、複雑なテストシナリオを作成し、コードの改訂ごとに再現性のあるテストサイクルを構築することが可能です。これにより、時間とリソースを節約できるだけでなく、テストサイクルの短縮、テストカバレッジの拡大、信頼性の向上といった大きなメリットが得られます。その結果、製品の品質向上と市場投入までの期間短縮を実現できます。
HILのメリット|Typhoon HILによるEVパワートレインコントローラ開発の効率化
EVパワートレイン向け最先端ソリューションを開発するには、制御開発を効率化する最先端プロセッサとテスト装置が必要です。インフィニオンは、堅牢なEVソリューション開発の要件を実現する高性能で高品質なマイコンを提供します。
Typhoon HIL を活用したテスト環境を構築することで、さまざまなシナリオ下でコントローラを徹底的にテストし、パワートレインの堅牢かつ信頼性の高い動作を保証するプラットフォームを確保できます。Typhoon HIL を使用すれば、高性能なインフィニオン製ハードウェアとお客様のソフトウェアを、高忠実度で再現された実際のイベントにさらすことが可能です。 その結果、コントローラは幅広い動作シナリオや故障状況にさらされ、実機ハードウェアを用いたテストに限りなく近い状態でDUTの挙動を検証することが可能になります。自動テストにより、各アップデートや新機能の追加後に、シームレスにコントローラを評価できます。さらに、ハードウェアテストのコストを増やすことなく、新しいテストを継続的に追加してテストカバレッジを拡大できます。テストの自動化に加え、テスト結果の自動レポート作成も可能であり、開発プロセスの信頼性の高いドキュメントを生成できます。
Typhoon HIL を使用すれば、インフィニオンの物理ハードウェア上で制御コードをすでに実行した状態で、MCUをさまざまなテストシナリオにさらすことができます。しかし、EVパワートレインコントローラの動作を正確に検証するには、テスト実行中にシステムの出力だけでなく、コントローラの内部状態にもアクセスできる必要があります。 そこで、VectorのVX1000ソリューションを使用することで、ECUの内部データにアクセスし、各テストシナリオに対してコントローラがどのように反応しているかを詳細に把握することができます。VX1000システムにより、EVパワートレインECUからのデータの読み取りおよびECUへのデータ送信が可能となり、コントローラの内部状態の測定や、制御ソフトウェアの動作を最適化するために必要なキャリブレーションを行うことができます。
インフィニオン、ベクター、Typhoon HIL 組み合わせることは、EVパワートレインコントローラ向けの制御ソフトウェアを開発・テストする上で非常に有効な方法です。このアプローチにより、時間とコストを削減できるだけでなく、信頼性が高く堅牢な性能が保証されます。
クレジット
著者 | カシアーノ・F・モライス、ヘイトル・J・テッサーロ、グスタボ・ブルインスマ
編集者 | ボリス・ヨバノビッチ、ペタル・ガートナー、デボラ・サント
ビジュアル | グスタボ・ブルインスマ、ヘイトル・J・テッサーロ、ミリカ・オブラドビッチ