はじめに
コントローラ・ハードウェア・イン・ザ・ループは、あらゆる境界条件を網羅できるため、実際の検証や実装に先立つ極めて重要かつ必須のステップである。
ノースカロライナ州立大学内の未来再生可能電力エネルギー供給・管理(FREEDM)システムセンターでは、米国の大学および産業界のパートナーが、先進的なパワーエレクトロニクスを活用した電力系統の近代化に注力している。
FREEDMシステムセンターの創設メンバーの一人として、スバシシュ・バタチャリヤ博士の研究は、直流マイクログリッドを含む電力電子工学および電力システムに焦点を当てている。
バタチャリヤ博士は、コントローラハードウェア・イン・ザ・ループ(C-HIL)が、学術界から産業界に至るDCマイクログリッド制御装置の設計・検証・試験サイクル時間を短縮した経緯について論じている。
直流マイクログリッド制御プラットフォームを設計、実装、検証する前に、私たちが取り組むべき主な課題は何ですか?
直流マイクログリッドへの様々な負荷源の統合において、主要な課題はこれらの負荷と電源をいかに適切にモデル化できるかである。そして常に残る疑問は、それらの相互作用の可能性についてである。
制御システムは、設計対象の負荷や電源を制御するだけでなく、あらゆる種類の振動や異なる負荷・電源間の相互作用を抑制できるような設計が必要です。言い換えれば、これらの制御装置はスマートかつ機敏でなければなりません。
オフラインシミュレーションはリアルタイムシミュレーションシステムと比較してどのような制限があるのでしょうか?
オフラインシミュレーションには重大な制限がある。我々の制御器は、制御器や負荷・電源の非理想性を考慮せず理想的なものになりがちである。電力電子機器におけるこうした非理想性は、制御相互作用の根源となることが多い。また、制御器のあらゆる境界条件を調査することも不可能である。
マイクログリッド制御装置の実装と検証の前に、コントローラハードウェア・イン・ザ・ループプラットフォームが必須のステップとなるのはなぜか?
コントローラハードウェア・イン・ザ・ループは、実際の検証や実装前に極めて重要かつ必須のステップです。これによりあらゆる境界条件を網羅的に検証でき、あたかも実機が目の前にあるかのようにコントローラを設計できるからです。
また、あらゆる種類のシステム障害をエミュレートすることも可能です。これはオフラインシミュレーションでは非常に高い精度や厳密さで実現することが不可能なものです。
このC-HILシステムが御社のコントローラの設計およびテストプロセスをどの程度加速したか、お見積もりいただけますか?
小規模な直流マイクログリッドシステムの場合、台風の影響がなければ3~4ヶ月かかるところを、ほぼ1~2週間に短縮できると断言できます。
Typhoon HIL 構成について、ごく簡単に説明していただけますか?
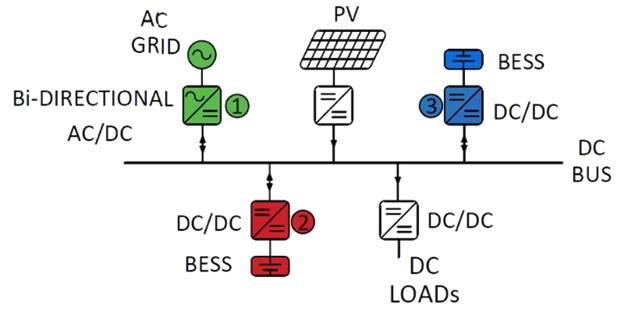
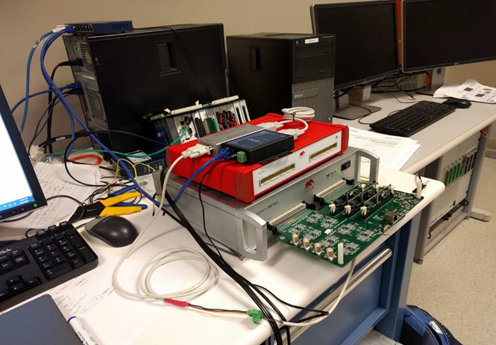
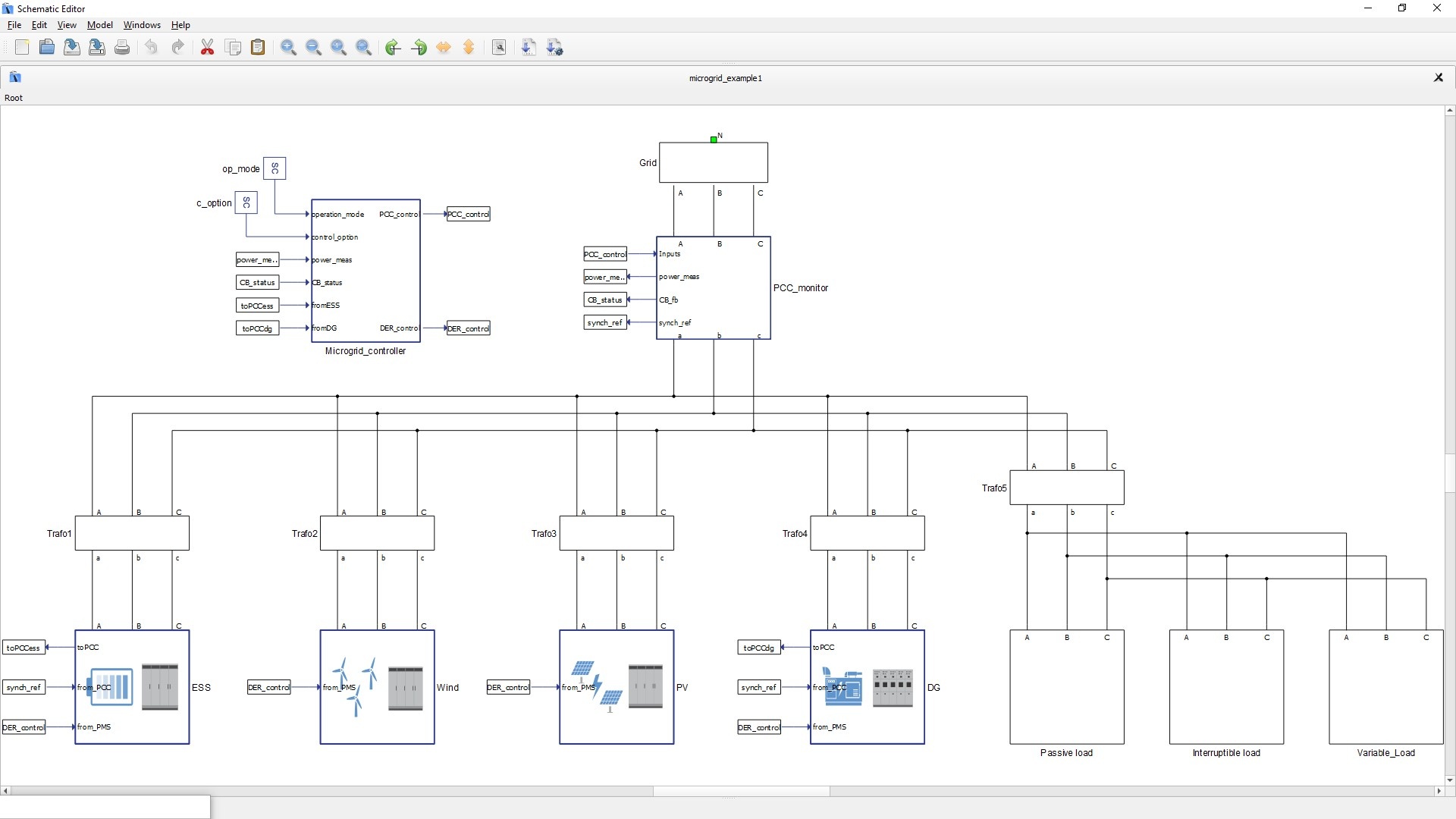
当社のシステムをエミュレートするために、 Typhoon HIL 1台使用しました。これは、いわばバックボーンシステムと考えていただければと思います。これにより、実際のシステムと同様に、バックボーンとして実際のDCバスを備えた環境が再現されます。このバス上では、あらゆる種類の外乱や故障、標準的なケース、さらには満たす必要のある規制条件などを自由に生成することができます。
さらに、そのシステムに負荷や電源として接続されている他のTyphoonシミュレータもあります。つまり、Typhoonボックスに接続された実際のコントローラがあり、Typhoonが実際のパワーエレクトロニクス変換システムをエミュレートしているわけです。
ご経験から、直流マイクログリッドにおける負荷、電源、その他の構成要素のモデルはどの程度現実的ですか?
Typhoonシステムは非常に現実的です。なぜなら、実際のコンバータ、つまり実際のスイッチングコンバータをエミュレートできるため、平均化によるモデリングを行う必要がないからです。外挿を行う必要もありません。 まるで目の前に実際のコンバータが置かれているかのように、それを扱っていることになります。DC-DCコンバータでも、DC-AC、AC-DC、あるいは実際のスイッチングを行うAC-ACコンバータであっても構いません。そして、これこそが大きな違いです。なぜなら、今やあなたは実際のシステム向けのコントローラを設計していることになるからです。
Typhoonシステム上でコントローラーの検証が完了すれば、実際のコンバーターに取り付ける前に、コントローラーに追加の変更を加える必要はなくなります。
それはとても力強いものだ。
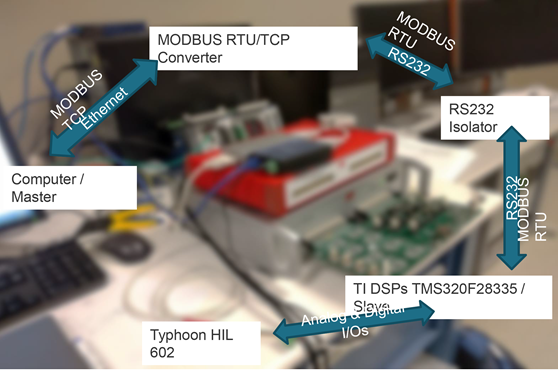
通信プロトコルについて話しましょう。では、DCマイクログリッド制御用の完全なModbus通信ネットワークをどのようにテストしたのですか?
Modbusはマスター・スレーブ方式で動作します。私たちは、あるTyphoonのModbusマスターから、同じくマスター・スレーブ方式で動作する他のTyphoon群への通信を設定しました。これは、実際の実装や産業現場での実装と全く同じです。つまり、これは実際のシナリオをほぼ忠実に再現していると言えます。
では、サイバーセキュリティについてはどうでしょうか?C-HILを用いてサイバーセキュリティ攻撃を防ぐための、万全な通信プロトコルをどのようにテストしたのですか?
サイバーセキュリティの観点から、いくつかの手法を試してきました。一つは、IC 61850のような高度なプロトコルを採用し、サイバーセキュリティ機能を組み込むことでシステムの完全な安全性を確保する方法です。Modbusでは、ハッキングを模した実験を行い、単一の端末から複数のコントローラに関する情報を抽出できることを確認しました。
私たちが実現し、実証しているのは、どのようなファイアウォールや機能を組み込む必要があるかを示すことです。これにより、コントローラーはリクエストがデータセンターのマイクログリッド内部からではなく外部から来ていることを判別できるようになります。
産業界での経験を持つ研究者として、この技術が商業的観点からも有用であるという点について、非常に興味深い視点をお持ちだと思います。このハードウェア・イン・ザ・ループは、研究室環境から産業現場への展開をどのように支援したのでしょうか?
ハードウェア・イン・ザ・ループは、実際のところ、研究段階から実地展開および産業検証段階への移行サイクル時間を大幅に短縮します。
私が皆さんにぜひ理解していただきたい最も重要な点は、Typhoonシステムを使えば、実際のコンバーターを忠実にエミュレートできるということです。
コントローラの観点から見れば、Typhoonボックスと実際のコンバータシステムとの間に違いはありません。そのため、これが設計どおり、かつ実システムで検証されたとおりに動作するという確信を非常に強く持てます。したがって、実システムへの移行期間を大幅に短縮できます。
研究者として、資金調達や研究発表において、これはどのように役立ちましたか?
資金面から見ると、実際のハードウェアでは不可能な多くのシナリオを迅速に試行し、条件や故障状態をエミュレートできます。このラピッドプロトタイピングの概念——あらゆる境界条件を迅速に網羅する——により、非常に包括的なテストケースを作成することが可能になります。
それにより、あらゆる未知数や疑問が解消されます。そして、資金審査担当者が通常抱く疑問への回答を事前に予測し提供できるため、その疑問解消に大きく貢献します。
学術誌は完全なハードウェア結果の代わりにHIL結果を受け入れますか?
私の経験上、HILの結果は受け入れられます。もし疑問が残る場合でも、基本的にはHIL結果1つをハードウェア結果1つで検証すれば十分です。繰り返しになりますが、私の経験ではHIL結果は実際に受け入れ可能です。というのも、我々の研究を通じてHIL結果とハードウェア結果が一致していることを実証しているからです。
では、他のHILソリューションTyphoon HIL の使用体験をどのように評価されますか?
私が常に言えることの一つは、 Typhoon HILを使用した際の生徒たちの習得までの時間が最も短かったということです。また、Typhoon HILは最も堅牢なシステムを提供してくれたと言えます。
そのため、生徒たちのやる気を本当に引き出すことができています。なぜなら、彼らは非常に短時間で強い興味を持ち、多くのことを探求できるようになるからです。
Typhoonが他のリアルタイムシステムと比べて際立っている点は、その堅牢性と使いやすさだと思います。
この技術があなたの研究において持つ最大の可能性は何ですか?
私たちは、論文や研究を通して、実際のシステムで複数のTyphoon HILを一緒に使う方法を実装し、示すことができました。ただ単にTyphoon HILを複数使うという観点ではなく、現場で目にするような実際のシステムをエミュレートするのです。世の中のものは分散しているので、パワーエレクトロニクスで分散制御システムをエミュレートすることになる。
HILでのご経験を、一言で表すとすると何ですか?
素晴らしいと言えるでしょう。
クレジット
著者 | サマンサ・ブルース
ビジュアル | FREEDM Center
編集者 | デボラ・サント


